
实例介绍
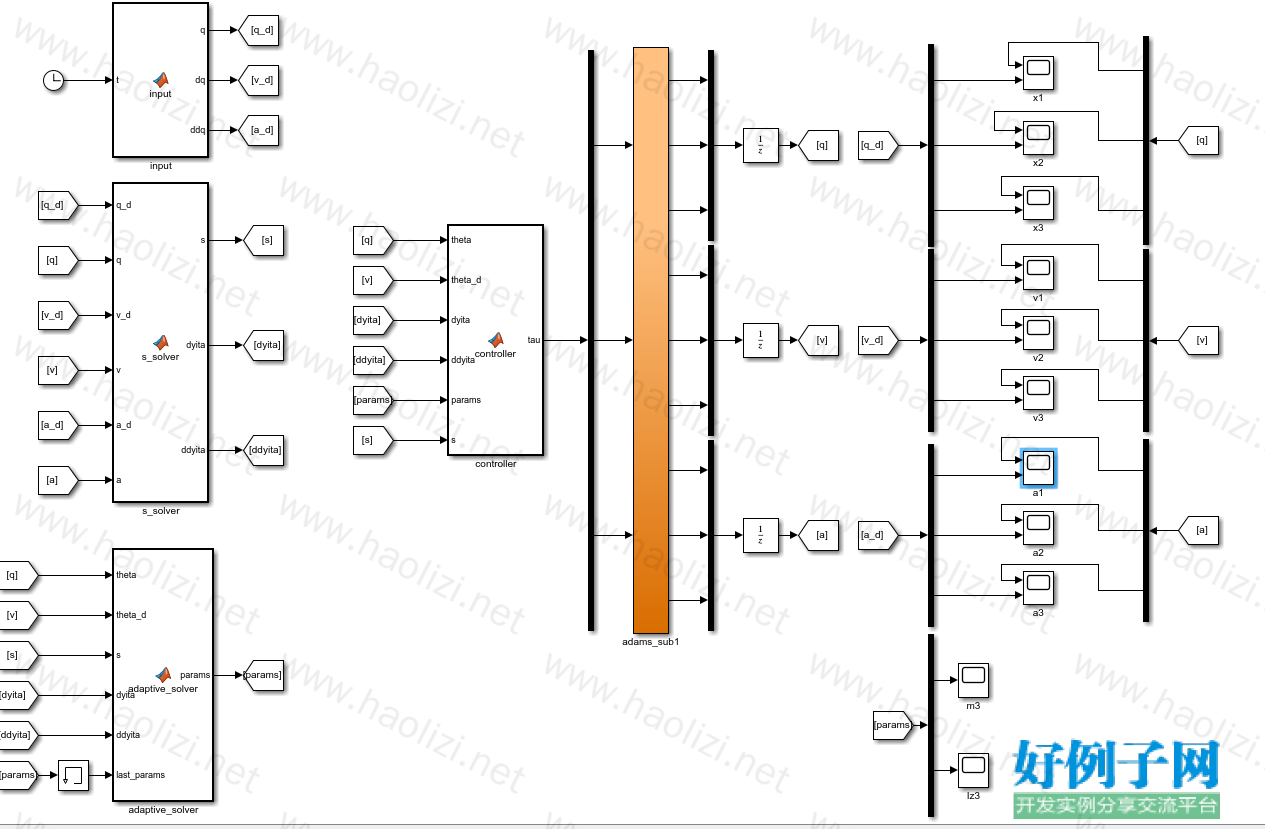
【实例截图】
【核心代码】见代码
seven_dof
├── DH_cal.m
├── MDHTrans.m
├── NE_dynamic.m
├── PD_control.slx
├── PD_control.slxc
├── PID_control.slx
├── PID_control.slxc
├── adams simulink开源项目
│ ├── 笔记.one
│ └── 打开笔记本.onetoc2
├── adams_sys_.slxc
├── aviewAS.cmd
├── cal_sum.m
├── dy_func.slx
├── dynamic.slx
├── dynamic.slxc
├── myNewtonEuler.m
├── myNewtonEuler2.m
├── myNewtonEuler3.m
├── newmodel.bin
├── ns3.adm
├── ns3.cmd
├── ns3.gra
├── ns3.m
├── ns3.msg
├── ns3.req
├── ns3.res
├── slprj
│ ├── _jitprj
│ │ ├── jitEngineAccessInfo.mat
│ │ ├── s3V56xI0OYTddn1cyqcTxZC.l
│ │ ├── s3V56xI0OYTddn1cyqcTxZC.mat
│ │ ├── s3kFETVX859rN4spzL7pRyF.l
│ │ ├── s3kFETVX859rN4spzL7pRyF.mat
│ │ ├── s9N4w31RaBIk1JZCX44aFRH.l
│ │ ├── s9N4w31RaBIk1JZCX44aFRH.mat
│ │ ├── sBDVlHhAsdnk3aoL2D9LX0G.l
│ │ ├── sBDVlHhAsdnk3aoL2D9LX0G.mat
│ │ ├── sCsN5McnnDAK11JnJzd0GyE.l
│ │ ├── sCsN5McnnDAK11JnJzd0GyE.mat
│ │ ├── sDw5Q6sR7CvItEzih4hzB3F.l
│ │ ├── sDw5Q6sR7CvItEzih4hzB3F.mat
│ │ ├── sIFjj6VFObFgvZSdmrafjwC.l
│ │ ├── sIFjj6VFObFgvZSdmrafjwC.mat
│ │ ├── sJcHsuxqjXKRMNFmHyiGTbG.l
│ │ ├── sJcHsuxqjXKRMNFmHyiGTbG.mat
│ │ ├── sKf0TgRLPfcKD53rGSzpw3B.l
│ │ ├── sKf0TgRLPfcKD53rGSzpw3B.mat
│ │ ├── sN1IAQbLrmw36biPTBvGEuD.l
│ │ ├── sN1IAQbLrmw36biPTBvGEuD.mat
│ │ ├── sROvphRBgOFgg1UGmAYZEZF.l
│ │ ├── sROvphRBgOFgg1UGmAYZEZF.mat
│ │ ├── sVpudK29bRZ010qZjiL7t6G.l
│ │ ├── sVpudK29bRZ010qZjiL7t6G.mat
│ │ ├── sb94NmQz67DfZudcs4yg6wC.l
│ │ ├── sb94NmQz67DfZudcs4yg6wC.mat
│ │ ├── sdruOCLHtnp7UBvI09IYanF.l
│ │ ├── sdruOCLHtnp7UBvI09IYanF.mat
│ │ ├── siq62fmGkWInCNT9oF7N3HE.l
│ │ ├── siq62fmGkWInCNT9oF7N3HE.mat
│ │ ├── sn9F5G5tBdxZkJ9h5wbZoLD.l
│ │ ├── sn9F5G5tBdxZkJ9h5wbZoLD.mat
│ │ ├── soZFlJrHiDQua631hOnhH7C.l
│ │ ├── soZFlJrHiDQua631hOnhH7C.mat
│ │ ├── supORUJJkbr26k4TFBLXApF.l
│ │ ├── supORUJJkbr26k4TFBLXApF.mat
│ │ ├── sv81gMGxWnW1yVEProUx7OB.l
│ │ ├── sv81gMGxWnW1yVEProUx7OB.mat
│ │ ├── swXFmD93ZRylSyQbdtUgNkE.l
│ │ ├── swXFmD93ZRylSyQbdtUgNkE.mat
│ │ ├── swfVzCvmeYHgAdJL1gsssTD.l
│ │ ├── swfVzCvmeYHgAdJL1gsssTD.mat
│ │ ├── swtCi9UcBaprJZ5kPJexO8F.l
│ │ ├── swtCi9UcBaprJZ5kPJexO8F.mat
│ │ ├── sxrTJpvQjDwY8bQGnLQcpyF.l
│ │ └── sxrTJpvQjDwY8bQGnLQcpyF.mat
│ ├── _sfprj
│ │ ├── EMLReport
│ │ │ ├── 4LUNzDxTZvojRd4ZGJyE1B
│ │ │ ├── 4LUNzDxTZvojRd4ZGJyE1B.mat
│ │ │ ├── emlReportAccessInfo.mat
│ │ │ ├── s3V56xI0OYTddn1cyqcTxZC
│ │ │ ├── s3V56xI0OYTddn1cyqcTxZC.mat
│ │ │ ├── s3kFETVX859rN4spzL7pRyF
│ │ │ ├── s3kFETVX859rN4spzL7pRyF.mat
│ │ │ ├── s9N4w31RaBIk1JZCX44aFRH
│ │ │ ├── s9N4w31RaBIk1JZCX44aFRH.mat
│ │ │ ├── sBDVlHhAsdnk3aoL2D9LX0G
│ │ │ ├── sBDVlHhAsdnk3aoL2D9LX0G.mat
│ │ │ ├── sCsN5McnnDAK11JnJzd0GyE
│ │ │ ├── sCsN5McnnDAK11JnJzd0GyE.mat
│ │ │ ├── sDw5Q6sR7CvItEzih4hzB3F
│ │ │ ├── sDw5Q6sR7CvItEzih4hzB3F.mat
│ │ │ ├── sIFjj6VFObFgvZSdmrafjwC
│ │ │ ├── sIFjj6VFObFgvZSdmrafjwC.mat
│ │ │ ├── sJcHsuxqjXKRMNFmHyiGTbG
│ │ │ ├── sJcHsuxqjXKRMNFmHyiGTbG.mat
│ │ │ ├── sKf0TgRLPfcKD53rGSzpw3B
│ │ │ ├── sKf0TgRLPfcKD53rGSzpw3B.mat
│ │ │ ├── sN1IAQbLrmw36biPTBvGEuD
│ │ │ ├── sN1IAQbLrmw36biPTBvGEuD.mat
│ │ │ ├── sROvphRBgOFgg1UGmAYZEZF
│ │ │ ├── sROvphRBgOFgg1UGmAYZEZF.mat
│ │ │ ├── sVpudK29bRZ010qZjiL7t6G
│ │ │ ├── sVpudK29bRZ010qZjiL7t6G.mat
│ │ │ ├── sb94NmQz67DfZudcs4yg6wC
│ │ │ ├── sb94NmQz67DfZudcs4yg6wC.mat
│ │ │ ├── sdruOCLHtnp7UBvI09IYanF
│ │ │ ├── sdruOCLHtnp7UBvI09IYanF.mat
│ │ │ ├── sfA0S5caYn6Qfqz5h6SpyZ
│ │ │ ├── sfA0S5caYn6Qfqz5h6SpyZ.mat
│ │ │ ├── siq62fmGkWInCNT9oF7N3HE
│ │ │ ├── siq62fmGkWInCNT9oF7N3HE.mat
│ │ │ ├── sn9F5G5tBdxZkJ9h5wbZoLD
│ │ │ ├── sn9F5G5tBdxZkJ9h5wbZoLD.mat
│ │ │ ├── soZFlJrHiDQua631hOnhH7C
│ │ │ ├── soZFlJrHiDQua631hOnhH7C.mat
│ │ │ ├── supORUJJkbr26k4TFBLXApF
│ │ │ ├── supORUJJkbr26k4TFBLXApF.mat
│ │ │ ├── sv81gMGxWnW1yVEProUx7OB
│ │ │ ├── sv81gMGxWnW1yVEProUx7OB.mat
│ │ │ ├── swXFmD93ZRylSyQbdtUgNkE
│ │ │ ├── swXFmD93ZRylSyQbdtUgNkE.mat
│ │ │ ├── swfVzCvmeYHgAdJL1gsssTD
│ │ │ ├── swfVzCvmeYHgAdJL1gsssTD.mat
│ │ │ ├── swtCi9UcBaprJZ5kPJexO8F
│ │ │ ├── swtCi9UcBaprJZ5kPJexO8F.mat
│ │ │ ├── sxrTJpvQjDwY8bQGnLQcpyF
│ │ │ └── sxrTJpvQjDwY8bQGnLQcpyF.mat
│ │ ├── dynamic
│ │ │ └── _self
│ │ │ └── sfun
│ │ │ └── info
│ │ │ └── binfo.mat
│ │ └── precompile
│ │ ├── 1Ff7udopdDH0Y3lx4UXaXH.mat
│ │ ├── 1yQ8icGg3tdjn3nW1ry2oF.mat
│ │ ├── 5Rut0BjUePZbHBi7ueansG.mat
│ │ ├── 5Z1rGvqI8jzjaxzu0di8HH.mat
│ │ ├── 7az8I8GzreWkOTuxVnLkZH.mat
│ │ ├── 9vaMLOEN73FEIMScUS6TLC.mat
│ │ ├── DMmq73YtzVqIg3cIqrOlbC.mat
│ │ ├── DTQtxg1BWPvDrDgnMI98yD.mat
│ │ ├── FnYjpqdZ3LUtL9wdoUItzE.mat
│ │ ├── KqBXjf83RoyPJcoZbhvq5G.mat
│ │ ├── N2mqvcdfxEcxYoQS3BItVE.mat
│ │ ├── Ock17SncjfoIMGQcvf4GNE.mat
│ │ ├── Oz03KixvslgJ5VPa94DJlF.mat
│ │ ├── PrTiXryMLTkiIXNdyNIW9B.mat
│ │ ├── Uz7cuVIFzD5cuE2ignu8WB.mat
│ │ ├── VVd7ppKQWxyq0vuSQsxpt.mat
│ │ ├── VwMexHTSbTxfZ1wqZjR4yC.mat
│ │ ├── Y163J2VeC8O114iC23OuxF.mat
│ │ ├── autoInferAccessInfo.mat
│ │ ├── lpiVdFEzbliR0t92hilOVE.mat
│ │ ├── oo8PC0ZEjBIkjciUrNAlvC.mat
│ │ ├── q5wAXnL3dJFgvdWJFeMoDB.mat
│ │ ├── tiyxwQC5NC0xJYj2KUCGVG.mat
│ │ ├── uJ99r8o3FkyVKsATZuFauD.mat
│ │ └── wnKzwOZDGHCxmcvB3jhABB.mat
│ ├── grt
│ │ └── adams_sys_
│ │ └── tmwinternal
│ │ └── minfo.mat
│ ├── modeladvisor
│ │ ├── UpgradeAdv_
│ │ │ └── adams_sys_
│ │ │ ├── ModelAdvisorData
│ │ │ ├── model_diagnose_custom.html
│ │ │ ├── report.html
│ │ │ └── report_1483.html
│ │ ├── adams_sys_
│ │ │ └── ModelAdvisorData
│ │ └── untitled
│ │ └── ModelAdvisorData
│ ├── sim
│ │ └── varcache
│ │ ├── PD_control
│ │ │ ├── checksumOfCache.mat
│ │ │ ├── tmwinternal
│ │ │ │ └── simulink_cache.xml
│ │ │ └── varInfo.mat
│ │ ├── PID_control
│ │ │ ├── checksumOfCache.mat
│ │ │ ├── tmwinternal
│ │ │ │ └── simulink_cache.xml
│ │ │ └── varInfo.mat
│ │ ├── adams_sys_
│ │ │ ├── checksumOfCache.mat
│ │ │ ├── tmwinternal
│ │ │ │ └── simulink_cache.xml
│ │ │ └── varInfo.mat
│ │ ├── adams_sys_COPY
│ │ │ ├── checksumOfCache.mat
│ │ │ ├── tmwinternal
│ │ │ │ └── simulink_cache.xml
│ │ │ └── varInfo.mat
│ │ ├── dynamic
│ │ │ ├── checksumOfCache.mat
│ │ │ ├── tmwinternal
│ │ │ │ └── simulink_cache.xml
│ │ │ └── varInfo.mat
│ │ └── untitled
│ │ ├── checksumOfCache.mat
│ │ ├── tmwinternal
│ │ │ └── simulink_cache.xml
│ │ └── varInfo.mat
│ └── sl_proj.tmw
├── three_dof_dynamics.m
├── three_dof_dynamics_2.m
└── 笔记.docx
57 directories, 154 files
相关软件
小贴士
感谢您为本站写下的评论,您的评论对其它用户来说具有重要的参考价值,所以请认真填写。
- 类似“顶”、“沙发”之类没有营养的文字,对勤劳贡献的楼主来说是令人沮丧的反馈信息。
- 相信您也不想看到一排文字/表情墙,所以请不要反馈意义不大的重复字符,也请尽量不要纯表情的回复。
- 提问之前请再仔细看一遍楼主的说明,或许是您遗漏了。
- 请勿到处挖坑绊人、招贴广告。既占空间让人厌烦,又没人会搭理,于人于己都无利。
关于好例子网
本站旨在为广大IT学习爱好者提供一个非营利性互相学习交流分享平台。本站所有资源都可以被免费获取学习研究。本站资源来自网友分享,对搜索内容的合法性不具有预见性、识别性、控制性,仅供学习研究,请务必在下载后24小时内给予删除,不得用于其他任何用途,否则后果自负。基于互联网的特殊性,平台无法对用户传输的作品、信息、内容的权属或合法性、安全性、合规性、真实性、科学性、完整权、有效性等进行实质审查;无论平台是否已进行审查,用户均应自行承担因其传输的作品、信息、内容而可能或已经产生的侵权或权属纠纷等法律责任。本站所有资源不代表本站的观点或立场,基于网友分享,根据中国法律《信息网络传播权保护条例》第二十二与二十三条之规定,若资源存在侵权或相关问题请联系本站客服人员,点此联系我们。关于更多版权及免责申明参见 版权及免责申明

网友评论
我要评论