

实例介绍
【实例简介】计算机视觉算法与应用(Computer Vision_ Algorithms and Applications)PDF学习资料
【实例截图】

【核心代码】
Contents
Preface
vii
1 Introduction
1
1.1 What is computer vision? ............................ 3
1.2 A brief history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3 Book overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.4 Sample syllabus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.5 A note on notation
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1.6 Additional reading
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2 Image formation
27
2.1 Geometric primitives and transformations . . . . . . . . . . . . . . . . . . . 29
2.1.1 Geometric primitives . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.1.2 2D transformations . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.1.3 3D transformations . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.1.4 3D rotations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.1.5 3D to 2D projections . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.1.6 Lens distortions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
2.2 Photometric image formation . . . . . . . . . . . . . . . . . . . . . . . . . . 54
2.2.1 Lighting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
2.2.2 Reflflectance and shading . . . . . . . . . . . . . . . . . . . . . . . . 55
2.2.3 Optics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
2.3 The digital camera
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
2.3.1 Sampling and aliasing . . . . . . . . . . . . . . . . . . . . . . . . . 69
2.3.2 Color . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
2.3.3 Compression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
2.4 Additional reading
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
2.5 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
3 Image processing
87
3.1 Point operators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
3.1.1 Pixel transforms
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
3.1.2 Color transforms . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
3.1.3 Compositing and matting . . . . . . . . . . . . . . . . . . . . . . . . 92
3.1.4 Histogram equalization . . . . . . . . . . . . . . . . . . . . . . . . . 94Contents
3.1.5
Application: Tonal adjustment . . . . . . . . . . . . . . . . . . . . . 97
3.2 Linear fifiltering
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
3.2.1 Separable fifiltering
. . . . . . . . . . . . . . . . . . . . . . . . . . . 102
3.2.2 Examples of linear fifiltering . . . . . . . . . . . . . . . . . . . . . . . 103
3.2.3 Band-pass and steerable fifilters . . . . . . . . . . . . . . . . . . . . . 104
3.3 More neighborhood operators . . . . . . . . . . . . . . . . . . . . . . . . . . 108
3.3.1 Non-linear fifiltering . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
3.3.2 Morphology
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
3.3.3 Distance transforms
. . . . . . . . . . . . . . . . . . . . . . . . . . 113
3.3.4 Connected components . . . . . . . . . . . . . . . . . . . . . . . . . 115
3.4 Fourier transforms
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
3.4.1 Fourier transform pairs . . . . . . . . . . . . . . . . . . . . . . . . . 119
3.4.2 Two-dimensional Fourier transforms . . . . . . . . . . . . . . . . . . 123
3.4.3 Wiener fifiltering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
3.4.4
Application: Sharpening, blur, and noise removal . . . . . . . . . . . 126
3.5 Pyramids and wavelets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
3.5.1 Interpolation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
3.5.2 Decimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
3.5.3 Multi-resolution representations . . . . . . . . . . . . . . . . . . . . 132
3.5.4 Wavelets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
3.5.5
Application: Image blending . . . . . . . . . . . . . . . . . . . . . . 140
3.6 Geometric transformations . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
3.6.1 Parametric transformations . . . . . . . . . . . . . . . . . . . . . . . 145
3.6.2 Mesh-based warping . . . . . . . . . . . . . . . . . . . . . . . . . . 149
3.6.3
Application: Feature-based morphing . . . . . . . . . . . . . . . . . 152
3.7 Global optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
3.7.1 Regularization
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
3.7.2 Markov random fifields . . . . . . . . . . . . . . . . . . . . . . . . . 158
3.7.3
Application: Image restoration . . . . . . . . . . . . . . . . . . . . . 169
3.8 Additional reading
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
3.9 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
4 Feature detection and matching
181
4.1 Points and patches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
4.1.1 Feature detectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
4.1.2 Feature descriptors . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
4.1.3 Feature matching . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
4.1.4 Feature tracking
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
4.1.5
Application: Performance-driven animation . . . . . . . . . . . . . . 209
4.2 Edges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
4.2.1 Edge detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
4.2.2 Edge linking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
4.2.3
Application: Edge editing and enhancement . . . . . . . . . . . . . . 219
4.3 Lines
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220
4.3.1 Successive approximation . . . . . . . . . . . . . . . . . . . . . . . 220
4.3.2 Hough transforms . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
xivContents
4.3.3 Vanishing points . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224
4.3.4
Application: Rectangle detection . . . . . . . . . . . . . . . . . . . . 226
4.4 Additional reading
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
4.5 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228
5 Segmentation
235
5.1 Active contours . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
5.1.1 Snakes
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238
5.1.2 Dynamic snakes and CONDENSATION . . . . . . . . . . . . . . . . 243
5.1.3 Scissors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
5.1.4 Level Sets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 248
5.1.5
Application: Contour tracking and rotoscoping . . . . . . . . . . . . 249
5.2 Split and merge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
5.2.1 Watershed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251
5.2.2 Region splitting (divisive clustering) . . . . . . . . . . . . . . . . . . 251
5.2.3 Region merging (agglomerative clustering) . . . . . . . . . . . . . . 251
5.2.4 Graph-based segmentation . . . . . . . . . . . . . . . . . . . . . . . 252
5.2.5 Probabilistic aggregation . . . . . . . . . . . . . . . . . . . . . . . . 253
5.3 Mean shift and mode fifinding . . . . . . . . . . . . . . . . . . . . . . . . . . 254
5.3.1 K-means and mixtures of Gaussians . . . . . . . . . . . . . . . . . . 256
5.3.2 Mean shift
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257
5.4 Normalized cuts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
5.5 Graph cuts and energy-based methods . . . . . . . . . . . . . . . . . . . . . 264
5.5.1
Application: Medical image segmentation . . . . . . . . . . . . . . . 268
5.6 Additional reading
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 268
5.7 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 270
6 Feature-based alignment
273
6.1 2D and 3D feature-based alignment
. . . . . . . . . . . . . . . . . . . . . . 275
6.1.1 2D alignment using least squares . . . . . . . . . . . . . . . . . . . . 275
6.1.2
Application: Panography . . . . . . . . . . . . . . . . . . . . . . . . 277
6.1.3 Iterative algorithms . . . . . . . . . . . . . . . . . . . . . . . . . . . 278
6.1.4 Robust least squares and RANSAC
. . . . . . . . . . . . . . . . . . 281
6.1.5 3D alignment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283
6.2 Pose estimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284
6.2.1 Linear algorithms . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284
6.2.2 Iterative algorithms . . . . . . . . . . . . . . . . . . . . . . . . . . . 286
6.2.3
Application: Augmented reality . . . . . . . . . . . . . . . . . . . . 287
6.3 Geometric intrinsic calibration . . . . . . . . . . . . . . . . . . . . . . . . . 288
6.3.1 Calibration patterns . . . . . . . . . . . . . . . . . . . . . . . . . . . 289
6.3.2 Vanishing points . . . . . . . . . . . . . . . . . . . . . . . . . . . . 290
6.3.3
Application: Single view metrology . . . . . . . . . . . . . . . . . . 292
6.3.4 Rotational motion
. . . . . . . . . . . . . . . . . . . . . . . . . . . 293
6.3.5 Radial distortion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295
6.4 Additional reading
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 296
6.5 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 296
xvContents
7 Structure from motion
303
7.1 Triangulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305
7.2 Two-frame structure from motion . . . . . . . . . . . . . . . . . . . . . . . . 307
7.2.1 Projective (uncalibrated) reconstruction . . . . . . . . . . . . . . . . 312
7.2.2 Self-calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313
7.2.3
Application: View morphing . . . . . . . . . . . . . . . . . . . . . . 315
7.3 Factorization
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315
7.3.1 Perspective and projective factorization . . . . . . . . . . . . . . . . 318
7.3.2
Application: Sparse 3D model extraction
. . . . . . . . . . . . . . . 319
7.4 Bundle adjustment
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 320
7.4.1 Exploiting sparsity . . . . . . . . . . . . . . . . . . . . . . . . . . . 322
7.4.2
Application: Match move and augmented reality . . . . . . . . . . . 324
7.4.3 Uncertainty and ambiguities . . . . . . . . . . . . . . . . . . . . . . 326
7.4.4
Application: Reconstruction from Internet photos . . . . . . . . . . . 327
7.5 Constrained structure and motion . . . . . . . . . . . . . . . . . . . . . . . . 329
7.5.1 Line-based techniques . . . . . . . . . . . . . . . . . . . . . . . . . 330
7.5.2 Plane-based techniques . . . . . . . . . . . . . . . . . . . . . . . . . 331
7.6 Additional reading
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332
7.7 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332
8 Dense motion estimation
335
8.1 Translational alignment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 337
8.1.1 Hierarchical motion estimation . . . . . . . . . . . . . . . . . . . . . 341
8.1.2 Fourier-based alignment . . . . . . . . . . . . . . . . . . . . . . . . 341
8.1.3 Incremental refifinement . . . . . . . . . . . . . . . . . . . . . . . . . 345
8.2 Parametric motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 350
8.2.1
Application: Video stabilization . . . . . . . . . . . . . . . . . . . . 354
8.2.2 Learned motion models . . . . . . . . . . . . . . . . . . . . . . . . . 354
8.3 Spline-based motion
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355
8.3.1
Application: Medical image registration . . . . . . . . . . . . . . . . 358
8.4 Optical flflow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 360
8.4.1 Multi-frame motion estimation . . . . . . . . . . . . . . . . . . . . . 363
8.4.2
Application: Video denoising
. . . . . . . . . . . . . . . . . . . . . 364
8.4.3
Application: De-interlacing
. . . . . . . . . . . . . . . . . . . . . . 364
8.5 Layered motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365
8.5.1
Application: Frame interpolation . . . . . . . . . . . . . . . . . . . . 368
8.5.2 Transparent layers and reflflections . . . . . . . . . . . . . . . . . . . 368
8.6 Additional reading
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 370
8.7 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 371
9 Image stitching
375
9.1 Motion models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 378
9.1.1 Planar perspective motion . . . . . . . . . . . . . . . . . . . . . . . 379
9.1.2
Application: Whiteboard and document scanning . . . . . . . . . . . 379
9.1.3 Rotational panoramas . . . . . . . . . . . . . . . . . . . . . . . . . . 380
9.1.4 Gap closing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382
xviContents
9.1.5
Application: Video summarization and compression
. . . . . . . . . 383
9.1.6 Cylindrical and spherical coordinates . . . . . . . . . . . . . . . . . 385
9.2 Global alignment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 387
9.2.1 Bundle adjustment . . . . . . . . . . . . . . . . . . . . . . . . . . . 388
9.2.2 Parallax removal . . . . . . . . . . . . . . . . . . . . . . . . . . . . 391
9.2.3 Recognizing panoramas . . . . . . . . . . . . . . . . . . . . . . . . 392
9.2.4 Direct vs. feature-based alignment . . . . . . . . . . . . . . . . . . . 393
9.3 Compositing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 396
9.3.1 Choosing a compositing surface . . . . . . . . . . . . . . . . . . . . 396
9.3.2 Pixel selection and weighting (de-ghosting) . . . . . . . . . . . . . . 398
9.3.3
Application: Photomontage
. . . . . . . . . . . . . . . . . . . . . . 403
9.3.4 Blending . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403
9.4 Additional reading
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 406
9.5 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 407
10 Computational photography
409
10.1 Photometric calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412
10.1.1 Radiometric response function . . . . . . . . . . . . . . . . . . . . . 412
10.1.2 Noise level estimation . . . . . . . . . . . . . . . . . . . . . . . . . 415
10.1.3 Vignetting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416
10.1.4 Optical blur (spatial response) estimation . . . . . . . . . . . . . . . 416
10.2 High dynamic range imaging . . . . . . . . . . . . . . . . . . . . . . . . . . 419
10.2.1 Tone mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 427
10.2.2 Application: Flash photography . . . . . . . . . . . . . . . . . . . . 434
10.3 Super-resolution and blur removal . . . . . . . . . . . . . . . . . . . . . . . 436
10.3.1 Color image demosaicing
. . . . . . . . . . . . . . . . . . . . . . . 440
10.3.2 Application: Colorization
. . . . . . . . . . . . . . . . . . . . . . . 442
10.4 Image matting and compositing . . . . . . . . . . . . . . . . . . . . . . . . . 443
10.4.1 Blue screen matting . . . . . . . . . . . . . . . . . . . . . . . . . . . 445
10.4.2 Natural image matting . . . . . . . . . . . . . . . . . . . . . . . . . 446
10.4.3 Optimization-based matting . . . . . . . . . . . . . . . . . . . . . . 450
10.4.4 Smoke, shadow, and flflash matting . . . . . . . . . . . . . . . . . . . 452
10.4.5 Video matting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454
10.5 Texture analysis and synthesis . . . . . . . . . . . . . . . . . . . . . . . . . 455
10.5.1 Application: Hole fifilling and inpainting . . . . . . . . . . . . . . . . 457
10.5.2 Application: Non-photorealistic rendering . . . . . . . . . . . . . . . 458
10.6 Additional reading
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 460
10.7 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 461
11 Stereo correspondence
467
11.1 Epipolar geometry
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 471
11.1.1 Rectifification
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472
11.1.2 Plane sweep . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 474
11.2 Sparse correspondence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475
11.2.1 3D curves and profifiles . . . . . . . . . . . . . . . . . . . . . . . . . 476
11.3 Dense correspondence
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 477
xviiContents
11.3.1 Similarity measures . . . . . . . . . . . . . . . . . . . . . . . . . . . 479
11.4 Local methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 480
11.4.1 Sub-pixel estimation and uncertainty . . . . . . . . . . . . . . . . . . 482
11.4.2 Application: Stereo-based head tracking . . . . . . . . . . . . . . . . 483
11.5 Global optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484
11.5.1 Dynamic programming . . . . . . . . . . . . . . . . . . . . . . . . . 485
11.5.2 Segmentation-based techniques . . . . . . . . . . . . . . . . . . . . 487
11.5.3 Application: Z-keying and background replacement . . . . . . . . . . 489
11.6 Multi-view stereo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 489
11.6.1 Volumetric and 3D surface reconstruction . . . . . . . . . . . . . . . 492
11.6.2 Shape from silhouettes . . . . . . . . . . . . . . . . . . . . . . . . . 497
11.7 Additional reading
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 499
11.8 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 500
12 3D reconstruction
505
12.1 Shape from X . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 508
12.1.1 Shape from shading and photometric stereo . . . . . . . . . . . . . . 508
12.1.2 Shape from texture . . . . . . . . . . . . . . . . . . . . . . . . . . . 510
12.1.3 Shape from focus . . . . . . . . . . . . . . . . . . . . . . . . . . . . 511
12.2 Active rangefifinding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 512
12.2.1 Range data merging
. . . . . . . . . . . . . . . . . . . . . . . . . . 515
12.2.2 Application: Digital heritage . . . . . . . . . . . . . . . . . . . . . . 517
12.3 Surface representations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 518
12.3.1 Surface interpolation . . . . . . . . . . . . . . . . . . . . . . . . . . 518
12.3.2 Surface simplifification
. . . . . . . . . . . . . . . . . . . . . . . . . 520
12.3.3 Geometry images . . . . . . . . . . . . . . . . . . . . . . . . . . . . 520
12.4 Point-based representations . . . . . . . . . . . . . . . . . . . . . . . . . . . 521
12.5 Volumetric representations . . . . . . . . . . . . . . . . . . . . . . . . . . . 522
12.5.1 Implicit surfaces and level sets . . . . . . . . . . . . . . . . . . . . . 522
12.6 Model-based reconstruction . . . . . . . . . . . . . . . . . . . . . . . . . . . 523
12.6.1 Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 524
12.6.2 Heads and faces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 526
12.6.3 Application: Facial animation . . . . . . . . . . . . . . . . . . . . . 528
12.6.4 Whole body modeling and tracking . . . . . . . . . . . . . . . . . . 530
12.7 Recovering texture maps and albedos
. . . . . . . . . . . . . . . . . . . . . 534
12.7.1 Estimating BRDFs . . . . . . . . . . . . . . . . . . . . . . . . . . . 536
12.7.2 Application: 3D photography
. . . . . . . . . . . . . . . . . . . . . 537
12.8 Additional reading
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 538
12.9 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 539
13 Image-based rendering
543
13.1 View interpolation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 545
13.1.1 View-dependent texture maps . . . . . . . . . . . . . . . . . . . . . 547
13.1.2 Application: Photo Tourism . . . . . . . . . . . . . . . . . . . . . . 548
13.2 Layered depth images . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 549
13.2.1 Impostors, sprites, and layers . . . . . . . . . . . . . . . . . . . . . . 549
xviiiContents
13.3 Light fifields and Lumigraphs . . . . . . . . . . . . . . . . . . . . . . . . . . 551
13.3.1 Unstructured Lumigraph . . . . . . . . . . . . . . . . . . . . . . . . 554
13.3.2 Surface light fifields . . . . . . . . . . . . . . . . . . . . . . . . . . . 555
13.3.3 Application: Concentric mosaics . . . . . . . . . . . . . . . . . . . . 556
13.4 Environment mattes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 556
13.4.1 Higher-dimensional light fifields . . . . . . . . . . . . . . . . . . . . . 558
13.4.2 The modeling to rendering continuum . . . . . . . . . . . . . . . . . 559
13.5 Video-based rendering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 560
13.5.1 Video-based animation . . . . . . . . . . . . . . . . . . . . . . . . . 560
13.5.2 Video textures
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 561
13.5.3 Application: Animating pictures . . . . . . . . . . . . . . . . . . . . 564
13.5.4 3D Video . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 564
13.5.5 Application: Video-based walkthroughs . . . . . . . . . . . . . . . . 566
13.6 Additional reading
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 569
13.7 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 570
14 Recognition
575
14.1 Object detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 578
14.1.1 Face detection
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 578
14.1.2 Pedestrian detection
. . . . . . . . . . . . . . . . . . . . . . . . . . 585
14.2 Face recognition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 588
14.2.1 Eigenfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 589
14.2.2 Active appearance and 3D shape models . . . . . . . . . . . . . . . . 596
14.2.3 Application: Personal photo collections . . . . . . . . . . . . . . . . 601
14.3 Instance recognition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 602
14.3.1 Geometric alignment . . . . . . . . . . . . . . . . . . . . . . . . . . 603
14.3.2 Large databases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 604
14.3.3 Application: Location recognition . . . . . . . . . . . . . . . . . . . 609
14.4 Category recognition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 611
14.4.1 Bag of words . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 612
14.4.2 Part-based models
. . . . . . . . . . . . . . . . . . . . . . . . . . . 615
14.4.3 Recognition with segmentation . . . . . . . . . . . . . . . . . . . . . 620
14.4.4 Application: Intelligent photo editing . . . . . . . . . . . . . . . . . 621
14.5 Context and scene understanding . . . . . . . . . . . . . . . . . . . . . . . . 625
14.5.1 Learning and large image collections
. . . . . . . . . . . . . . . . . 627
14.5.2 Application: Image search . . . . . . . . . . . . . . . . . . . . . . . 630
14.6 Recognition databases and test sets . . . . . . . . . . . . . . . . . . . . . . . 631
14.7 Additional reading
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 631
14.8 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 637
15 Conclusion
641
A Linear algebra and numerical techniques
645
A.1 Matrix decompositions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 646
A.1.1 Singular value decomposition . . . . . . . . . . . . . . . . . . . . . 646
A.1.2 Eigenvalue decomposition . . . . . . . . . . . . . . . . . . . . . . . 647
xixContents
A.1.3 QR factorization . . . . . . . . . . . . . . . . . . . . . . . . . . . . 649
A.1.4 Cholesky factorization . . . . . . . . . . . . . . . . . . . . . . . . . 650
A.2 Linear least squares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 651
A.2.1 Total least squares . . . . . . . . . . . . . . . . . . . . . . . . . . . 653
A.3 Non-linear least squares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 654
A.4 Direct sparse matrix techniques . . . . . . . . . . . . . . . . . . . . . . . . . 655
A.4.1 Variable reordering . . . . . . . . . . . . . . . . . . . . . . . . . . . 656
A.5 Iterative techniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 656
A.5.1 Conjugate gradient . . . . . . . . . . . . . . . . . . . . . . . . . . . 657
A.5.2 Preconditioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 659
A.5.3 Multigrid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 660
B Bayesian modeling and inference
661
B.1 Estimation theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 662
B.1.1 Likelihood for multivariate Gaussian noise
. . . . . . . . . . . . . . 663
B.2 Maximum likelihood estimation and least squares . . . . . . . . . . . . . . . 665
B.3 Robust statistics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 666
B.4 Prior models and Bayesian inference . . . . . . . . . . . . . . . . . . . . . . 667
B.5 Markov random fifields . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 668
B.5.1 Gradient descent and simulated annealing . . . . . . . . . . . . . . . 670
B.5.2 Dynamic programming . . . . . . . . . . . . . . . . . . . . . . . . . 670
B.5.3 Belief propagation . . . . . . . . . . . . . . . . . . . . . . . . . . . 672
B.5.4 Graph cuts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 674
B.5.5 Linear programming . . . . . . . . . . . . . . . . . . . . . . . . . . 676
B.6 Uncertainty estimation (error analysis) . . . . . . . . . . . . . . . . . . . . . 678
C Supplementary material
679
C.1 Data sets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 680
C.2 Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 682
C.3 Slides and lectures
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 689
C.4 Bibliography
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 690
References
691
Index
793
xxChapter 1
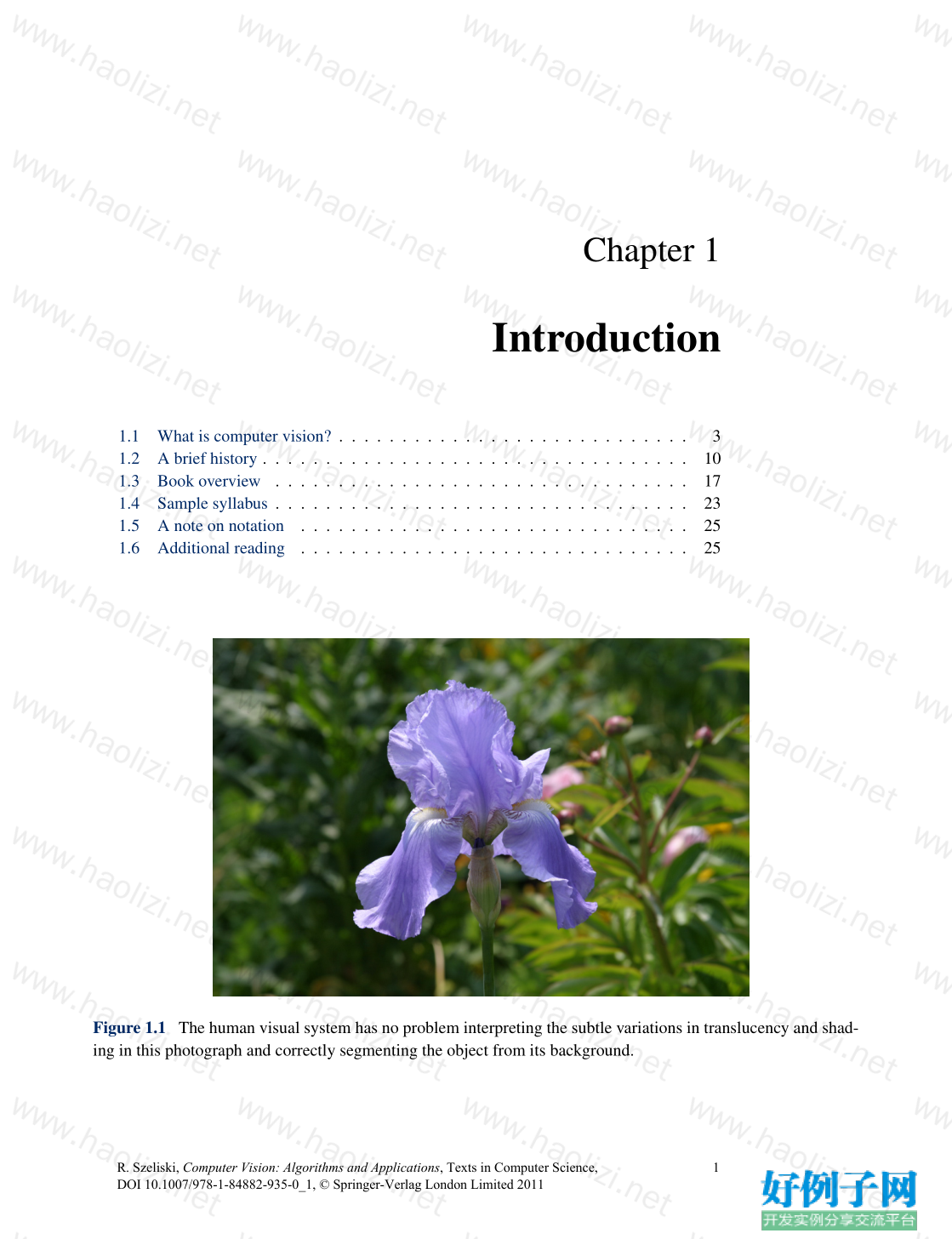
Introduction
1.1 What is computer vision? ............................ 3
1.2 A brief history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3 Book overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.4 Sample syllabus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.5 A note on notation
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1.6 Additional reading
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
好例子网口号:伸出你的我的手 — 分享!
相关软件
小贴士
感谢您为本站写下的评论,您的评论对其它用户来说具有重要的参考价值,所以请认真填写。
- 类似“顶”、“沙发”之类没有营养的文字,对勤劳贡献的楼主来说是令人沮丧的反馈信息。
- 相信您也不想看到一排文字/表情墙,所以请不要反馈意义不大的重复字符,也请尽量不要纯表情的回复。
- 提问之前请再仔细看一遍楼主的说明,或许是您遗漏了。
- 请勿到处挖坑绊人、招贴广告。既占空间让人厌烦,又没人会搭理,于人于己都无利。
关于好例子网
本站旨在为广大IT学习爱好者提供一个非营利性互相学习交流分享平台。本站所有资源都可以被免费获取学习研究。本站资源来自网友分享,对搜索内容的合法性不具有预见性、识别性、控制性,仅供学习研究,请务必在下载后24小时内给予删除,不得用于其他任何用途,否则后果自负。基于互联网的特殊性,平台无法对用户传输的作品、信息、内容的权属或合法性、安全性、合规性、真实性、科学性、完整权、有效性等进行实质审查;无论平台是否已进行审查,用户均应自行承担因其传输的作品、信息、内容而可能或已经产生的侵权或权属纠纷等法律责任。本站所有资源不代表本站的观点或立场,基于网友分享,根据中国法律《信息网络传播权保护条例》第二十二与二十三条之规定,若资源存在侵权或相关问题请联系本站客服人员,点此联系我们。关于更多版权及免责申明参见 版权及免责申明

网友评论
我要评论