
实例介绍
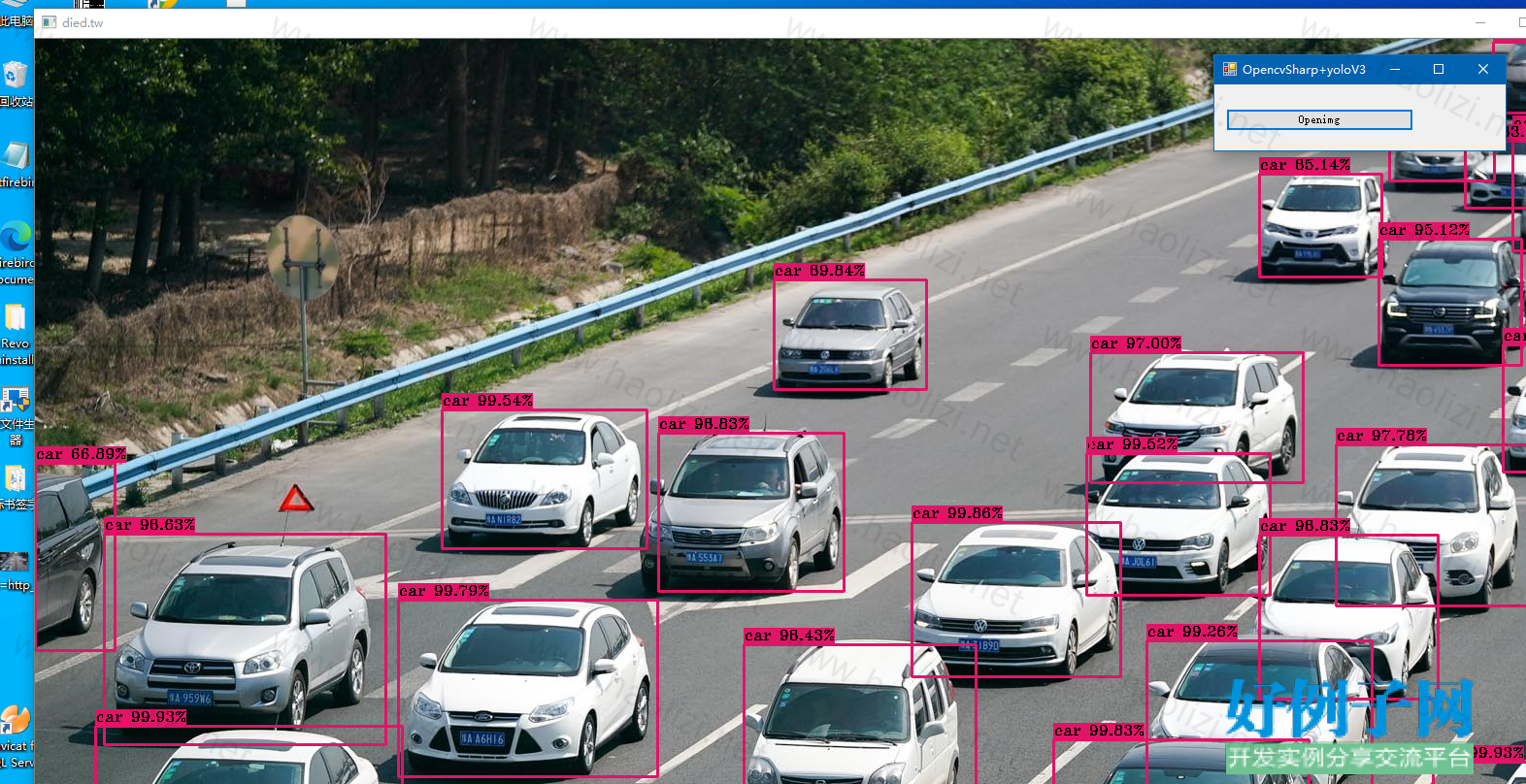
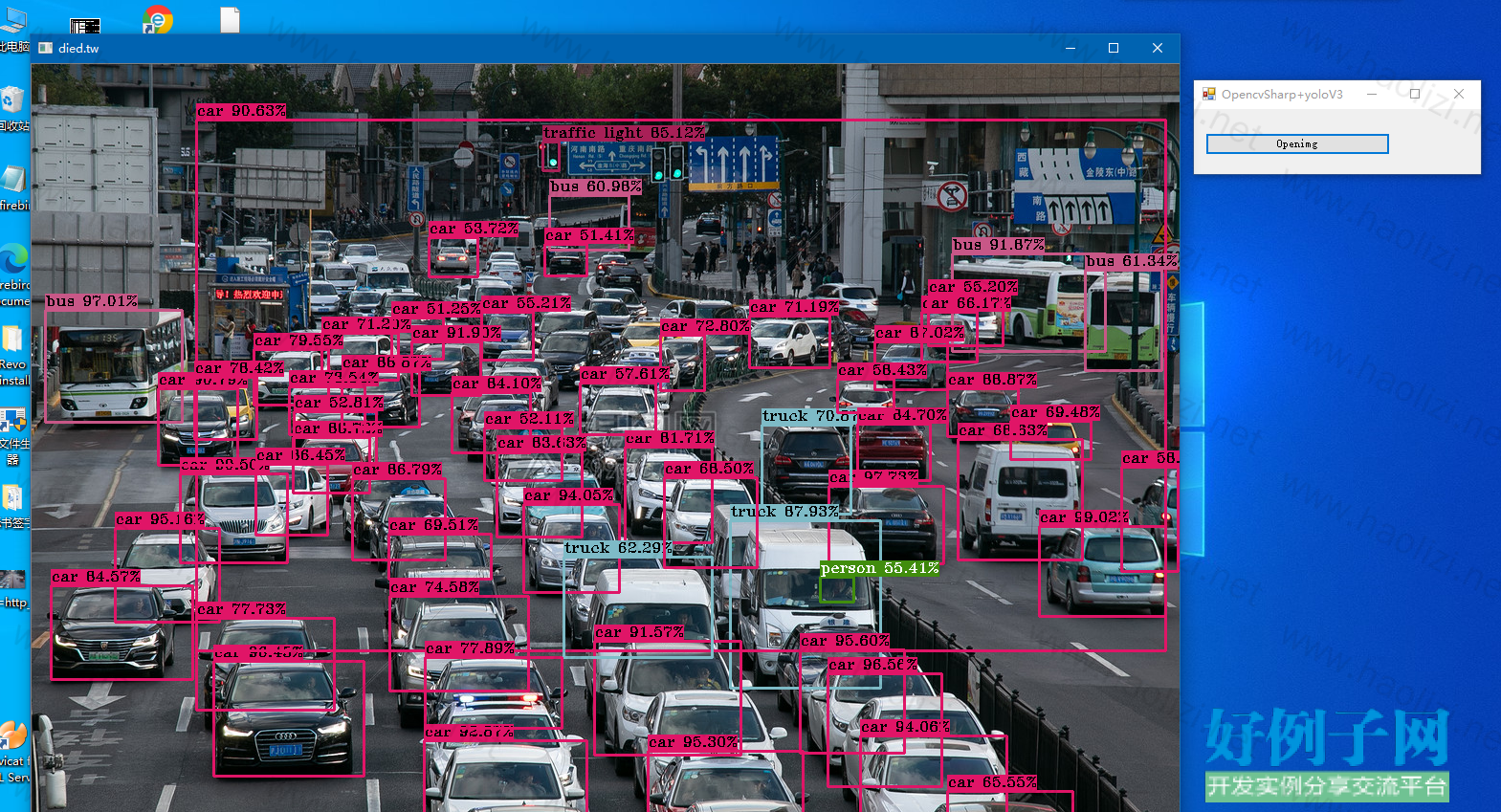
【实例简介】C# Opencvsharp yolov winform应用
现在网上很少关于C#目标检测的例子,要么质量不高,需要用Py
本例子基于开源代码,改成了WINFORM应用
【实例截图】


【核心代码】
using System;
using System.Collections.Generic;
using System.Diagnostics;
using System.IO;
using System.Linq;
using OpenCvSharp;
using OpenCvSharp.Dnn;
namespace Myopencv
{
/// <summary>
/// OpenCvSharp V4 with YOLO v3
/// Thank @shimat and Joseph Redmon
///
/// OpenCvSharp
/// https://github.com/shimat/opencvsharp/
///
/// YOLO
/// https://pjreddie.com/darknet/yolo/
/// </summary>
class Opencvt
{
#region const/readonly
//YOLOv3
//https://github.com/pjreddie/darknet/blob/master/cfg/yolov3.cfg
private const string Cfg = "yolov3.cfg";
//https://pjreddie.com/media/files/yolov3.weights
private const string Weight = "yolov3.weights";
//https://github.com/pjreddie/darknet/blob/master/data/coco.names
private const string Names = "coco.names";
//file location
private const string Location = "../../Content/";
//random assign color to each label
private static readonly Scalar[] Colors = Enumerable.Repeat(false, 80).Select(x => Scalar.RandomColor()).ToArray();
//get labels from coco.names
private static readonly string[] Labels = File.ReadAllLines(Path.Combine(Location, Names)).ToArray();
#endregion
public void ments(string img)
{
#region parameter
var image = img;
var cfg = Path.Combine(Location, Cfg);
var model = Path.Combine(Location, Weight);
const float threshold = 0.5f; //for confidence
const float nmsThreshold = 0.3f; //threshold for nms
#endregion
//get image
var org = new Mat(image);
//setting blob, size can be:320/416/608
//opencv blob setting can check here https://github.com/opencv/opencv/tree/master/samples/dnn#object-detection
var blob = CvDnn.BlobFromImage(org, 1.0 / 255, new Size(416, 416), new Scalar(), true, false);
//load model and config, if you got error: "separator_index < line.size()", check your cfg file, must be something wrong.
var net = CvDnn.ReadNetFromDarknet(cfg, model);
#region set preferable
net.SetPreferableBackend(3);
/*
0:DNN_BACKEND_DEFAULT
1:DNN_BACKEND_HALIDE
2:DNN_BACKEND_INFERENCE_ENGINE
3:DNN_BACKEND_OPENCV
*/
net.SetPreferableTarget(0);
/*
0:DNN_TARGET_CPU
1:DNN_TARGET_OPENCL
2:DNN_TARGET_OPENCL_FP16
3:DNN_TARGET_MYRIAD
4:DNN_TARGET_FPGA
*/
#endregion
//input data
net.SetInput(blob);
//get output layer name
var outNames = net.GetUnconnectedOutLayersNames();
//create mats for output layer
var outs = outNames.Select(_ => new Mat()).ToArray();
#region forward model
Stopwatch sw = new Stopwatch();
sw.Start();
net.Forward(outs, outNames);
sw.Stop();
Console.WriteLine($"Runtime:{sw.ElapsedMilliseconds} ms");
#endregion
//get result from all output
GetResult(outs, org, threshold, nmsThreshold);
using (new Window("died.tw", org))
{
Cv2.WaitKey();
}
}
/// <summary>
/// Get result form all output
/// </summary>
/// <param name="output"></param>
/// <param name="image"></param>
/// <param name="threshold"></param>
/// <param name="nmsThreshold">threshold for nms</param>
/// <param name="nms">Enable Non-maximum suppression or not</param>
private static void GetResult(IEnumerable<Mat> output, Mat image, float threshold, float nmsThreshold, bool nms = true)
{
//for nms
var classIds = new List<int>();
var confidences = new List<float>();
var probabilities = new List<float>();
var boxes = new List<Rect2d>();
var w = image.Width;
var h = image.Height;
/*
YOLO3 COCO trainval output
0 1 : center 2 3 : w/h
4 : confidence 5 ~ 84 : class probability
*/
const int prefix = 5; //skip 0~4
foreach (var prob in output)
{
for (var i = 0; i < prob.Rows; i )
{
var confidence = prob.At<float>(i, 4);
if (confidence > threshold)
{
//get classes probability
Cv2.MinMaxLoc(prob.Row[i].ColRange(prefix, prob.Cols), out _, out Point max);
var classes = max.X;
var probability = prob.At<float>(i, classes prefix);
if (probability > threshold) //more accuracy, you can cancel it
{
//get center and width/height
var centerX = prob.At<float>(i, 0) * w;
var centerY = prob.At<float>(i, 1) * h;
var width = prob.At<float>(i, 2) * w;
var height = prob.At<float>(i, 3) * h;
if (!nms)
{
// draw result (if don't use NMSBoxes)
Draw(image, classes, confidence, probability, centerX, centerY, width, height);
continue;
}
//put data to list for NMSBoxes
classIds.Add(classes);
confidences.Add(confidence);
probabilities.Add(probability);
boxes.Add(new Rect2d(centerX, centerY, width, height));
}
}
}
}
if (!nms) return;
//using non-maximum suppression to reduce overlapping low confidence box
CvDnn.NMSBoxes(boxes, confidences, threshold, nmsThreshold, out int[] indices);
Console.WriteLine($"NMSBoxes drop {confidences.Count - indices.Length} overlapping result.");
foreach (var i in indices)
{
var box = boxes[i];
Draw(image, classIds[i], confidences[i], probabilities[i], box.X, box.Y, box.Width, box.Height);
}
}
/// <summary>
/// Draw result to image
/// </summary>
/// <param name="image"></param>
/// <param name="classes"></param>
/// <param name="confidence"></param>
/// <param name="probability"></param>
/// <param name="centerX"></param>
/// <param name="centerY"></param>
/// <param name="width"></param>
/// <param name="height"></param>
private static void Draw(Mat image, int classes, float confidence, float probability, double centerX, double centerY, double width, double height)
{
//label formating
var label = $"{Labels[classes]} {probability * 100:0.00}%";
Console.WriteLine($"confidence {confidence * 100:0.00}% {label}");
var x1 = (centerX - width / 2) < 0 ? 0 : centerX - width / 2; //avoid left side over edge
//draw result
image.Rectangle(new Point(x1, centerY - height / 2), new Point(centerX width / 2, centerY height / 2), Colors[classes], 2);
var textSize = Cv2.GetTextSize(label, HersheyFonts.HersheyTriplex, 0.5, 1, out var baseline);
Cv2.Rectangle(image, new Rect(new Point(x1, centerY - height / 2 - textSize.Height - baseline),
new Size(textSize.Width, textSize.Height baseline)), Colors[classes], Cv2.FILLED);
var textColor = Cv2.Mean(Colors[classes]).Val0 < 70 ? Scalar.White : Scalar.Black;
Cv2.PutText(image, label, new Point(x1, centerY - height / 2 - baseline), HersheyFonts.HersheyTriplex, 0.5, textColor);
}
}
小贴士
感谢您为本站写下的评论,您的评论对其它用户来说具有重要的参考价值,所以请认真填写。
- 类似“顶”、“沙发”之类没有营养的文字,对勤劳贡献的楼主来说是令人沮丧的反馈信息。
- 相信您也不想看到一排文字/表情墙,所以请不要反馈意义不大的重复字符,也请尽量不要纯表情的回复。
- 提问之前请再仔细看一遍楼主的说明,或许是您遗漏了。
- 请勿到处挖坑绊人、招贴广告。既占空间让人厌烦,又没人会搭理,于人于己都无利。
关于好例子网
本站旨在为广大IT学习爱好者提供一个非营利性互相学习交流分享平台。本站所有资源都可以被免费获取学习研究。本站资源来自网友分享,对搜索内容的合法性不具有预见性、识别性、控制性,仅供学习研究,请务必在下载后24小时内给予删除,不得用于其他任何用途,否则后果自负。基于互联网的特殊性,平台无法对用户传输的作品、信息、内容的权属或合法性、安全性、合规性、真实性、科学性、完整权、有效性等进行实质审查;无论平台是否已进行审查,用户均应自行承担因其传输的作品、信息、内容而可能或已经产生的侵权或权属纠纷等法律责任。本站所有资源不代表本站的观点或立场,基于网友分享,根据中国法律《信息网络传播权保护条例》第二十二与二十三条之规定,若资源存在侵权或相关问题请联系本站客服人员,点此联系我们。关于更多版权及免责申明参见 版权及免责申明

网友评论
我要评论