
实例介绍
【实例简介】三菱CR750 CR751功能和操作的详细说明 BFP-A8985-B
三菱电机工业机器人
CR750/CR751/CR760 系列控制器
操作说明书
【实例截图】

【核心代码】
目录
页
1 开始使用 .......................................................................................................................................... 1-1
1.1 操作说明书的使用方法 .............................................................................................................. 1-1
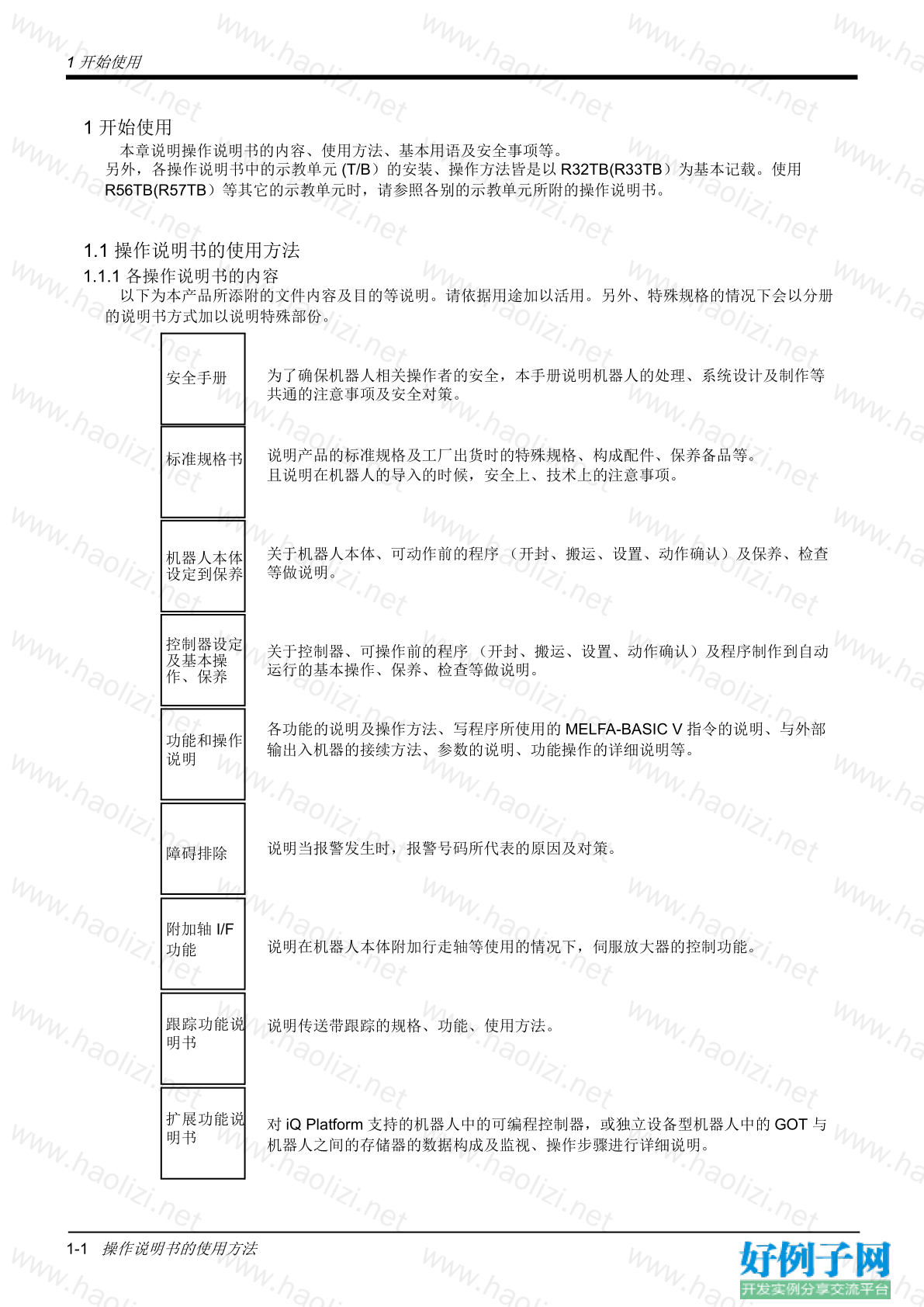
1.1.1 各操作说明书的内容 ........................................................................................................... 1-1
1.1.2 操作说明书中的符号 ........................................................................................................... 1-2
1.2 安全上的注意 ............................................................................................................................ 1-3
1.2.1 确认使用的方法能遵守法律的规则。 ................................................................................... 1-3
1.2.2 安全手册注意事项 ............................................................................................................... 1-4
2 功能的说明 ...................................................................................................................................... 2-7
2.1 操作面板 (O/P)的功能 (CR750 控制器) ............................................................................ 2-7
(1) 操作面板的按钮说明 ......................................................................................................... 2-7
(2) STATUS 编号 (显示面板)的说明 .................................................................................. 2-7
(3) 机型复位操作的说明 ......................................................................................................... 2-8
2.2 操作面板 (O/P)的功能 (CR760 控制器) ............................................................................ 2-9
(1) 操作面板的按钮说明 ......................................................................................................... 2-9
(2) 机型复位操作的说明 ....................................................................................................... 2-10
2.3 示教单元的 (T/B)的功能 ..................................................................................................... 2-11
2.3.1 关于操作权 ........................................................................................................................ 2-13
2.4 动作及控制相关的功能 ............................................................................................................ 2-14
3 操作方法的说明 ............................................................................................................................. 3-16
3.1 示教单元的菜单画面操作 ........................................................................................................ 3-16
(1) 画面树形图 ..................................................................................................................... 3-16
(2) 数字 / 文字的输入 ........................................................................................................... 3-20
(3) 菜单的选择方法 .............................................................................................................. 3-21
3.2 JOG 前进 (概略说明) ........................................................................................................... 3-22
3.2.1 JOG 前进的种类 ................................................................................................................ 3-22
3.2.2 JOG 前进的速度 ................................................................................................................ 3-24
3.2.3 关节 JOG .......................................................................................................................... 3-25
3.2.4 直交 JOG .......................................................................................................................... 3-25
3.2.5 TOOL JOG ........................................................................................................................ 3-26
3.2.6 三轴直交 JOG ................................................................................................................... 3-26
3.2.7 圆筒 JOG .......................................................................................................................... 3-27
3.2.8 工件 JOG .......................................................................................................................... 3-27
3.2.9 工具数据的切换 ................................................................................................................. 3-28
3.2.10 世界坐标系的切换 (基本坐标号码的指定) ................................................................... 3-29
3.2.11 JOG 操作中的冲突检知 ................................................................................................... 3-31
(1) JOG 操作时的冲突检知基准调整 .................................................................................... 3-31
3.3 抓手开闭 .................................................................................................................................. 3-32
3.4 整列抓手 .................................................................................................................................. 3-33
3.5 程序编辑 .................................................................................................................................. 3-34
3.5.1 程序的制作 ........................................................................................................................ 3-34
(1) 开启程序编辑画面 ........................................................................................................... 3-34
(2) 程序的制作 ..................................................................................................................... 3-35
(3) 程序制作的结束储存 ....................................................................................................... 3-37
(4) 程序的修正方法 .............................................................................................................. 3-38
(5) 现在位置的示教 .............................................................................................................. 3-40
(6) 位置变量的删除 .............................................................................................................. 3-43
(7) 位置数据的确认 .............................................................................................................. 3-44
(8) 位置数据的 MDI (Manual Data Input)登录 (修正) ................................................... 3-45
3.6 排错操作 .................................................................................................................................. 3-46
(1) 单步前进 ......................................................................................................................... 3-46
(2) 步编号返回 ..................................................................................................................... 3-47
(3) 其它插槽的单步前进 ....................................................................................................... 3-48
(4) STEP 跳转 ...................................................................................................................... 3-50
3.7 自动运行 .................................................................................................................................. 3-51
i目录
页
3.7.1 动作速度的设定 ................................................................................................................. 3-51
(1) 在 O/P 的操作 ................................................................................................................. 3-51
(2) 在示教单元的操作 ........................................................................................................... 3-51
3.7.2 程序号码的选择 ................................................................................................................. 3-51
3.7.3 自动运行的开始 ................................................................................................................. 3-52
(1) 通过 O/P 启动 ................................................................................................................ 3-52
(2) 通过示教单元启动 ........................................................................................................... 3-53
3.7.4 停止 ................................................................................................................................... 3-56
(1) 在 O/P 的操作 ................................................................................................................. 3-56
(2) 在示教单元的操作 ........................................................................................................... 3-56
3.7.5 停止之后重开启自动运行 .................................................................................................. 3-57
(1) 右面板 (O/P)再开 ....................................................................................................... 3-57
(2) 通过示教单元重启 ........................................................................................................... 3-57
3.7.6 程序复位 ........................................................................................................................... 3-58
(1) 在操作面板 (O/P)的操作 ............................................................................................ 3-58
(2) 在示教单元的操作 ........................................................................................................... 3-58
3.8 伺服 ON/OFF .......................................................................................................................... 3-59
3.9 报警复位操作 .......................................................................................................................... 3-60
3.10 无法解除报警的暂时报警复位操作 ........................................................................................ 3-60
3.11 管理 · 编辑画面的操作 ........................................................................................................... 3-61
(1) 程序一览表示 .................................................................................................................. 3-61
(2) 复制程序 (复制) ........................................................................................................... 3-62
(3) 变更程序名称 (重命名) ................................................................................................ 3-63
(4) 删除程序 (删除) ........................................................................................................... 3-64
(5) 保护 (Protect) .............................................................................................................. 3-65
(6) 程序的选择 ..................................................................................................................... 3-66
3.12 运行画面的操作 ..................................................................................................................... 3-67
3.12.1 执行行的显示 .................................................................................................................. 3-67
(1) 确认画面的选择 .............................................................................................................. 3-67
(2) 单步运行 ........................................................................................................................ 3-67
(3) 单步跳转 ......................................................................................................................... 3-69
(4) 在其它插槽的单步前进 ................................................................................................... 3-70
(5) 确认画面的结束 .............................................................................................................. 3-70
3.12.2 单步运行画面 .................................................................................................................. 3-71
(1) 单步运行画面的选择 ....................................................................................................... 3-71
3.12.3 操作面板画面的操作 ....................................................................................................... 3-72
3.13 监视画面的操作 ..................................................................................................................... 3-73
(1) 输入信号监视 .................................................................................................................. 3-73
(2) 输出信号监视 .................................................................................................................. 3-75
(3) 输入寄存器监视 .............................................................................................................. 3-77
(4) 输出寄存器监视 .............................................................................................................. 3-78
(5) 变量监视 ......................................................................................................................... 3-81
(6) 报警历史 ......................................................................................................................... 3-83
3.14 参数画面的操作 ..................................................................................................................... 3-84
3.15 原点 · 制动器画面的操作 ....................................................................................................... 3-86
(1) 原点 ................................................................................................................................ 3-86
(2) 剎车 ................................................................................................................................ 3-86
3.16 设定 / 初始化画面的操作 ....................................................................................................... 3-88
(1) 程序的初始化 .................................................................................................................. 3-88
(2) 参数的初始化 .................................................................................................................. 3-89
(3) 电池的初始化 .................................................................................................................. 3-90
(4) 操作 ................................................................................................................................ 3-91
(5) 时间设定 ......................................................................................................................... 3-92
(6) 版本 ................................................................................................................................ 3-92
3.17 扩展功能的操作 ..................................................................................................................... 3-93
(1) PLC 直接 ....................................................................................................................... 3-93
ii目录
页
(2) 工件坐标 ......................................................................................................................... 3-93
3.18 初始设定画面的操作 .............................................................................................................. 3-94
(1) 显示语言的设定 .............................................................................................................. 3-94
(2) 明亮度的设定示教单元 ................................................................................................... 3-96
4 MELFA-BASIC V ........................................................................................................................... 4-98
4.1 MELFA-BASIC V 的功能 ......................................................................................................... 4-98
4.1.1 机器人的动作控制 ............................................................................................................. 4-99
(1) 关节插补动作 .................................................................................................................. 4-99
(2) 直线插补动作 ................................................................................................................ 4-100
(3) 圆弧插补动作 ................................................................................................................ 4-101
(4) 连续动作 ....................................................................................................................... 4-103
(5) 加减速时间和速度控制 ................................................................................................. 4-104
(6) 往目的位置的到达确认 ................................................................................................. 4-106
(7) 高轨迹精度控制 ............................................................................................................ 4-107
(8) 抓手 ·TOOL 控制 .......................................................................................................... 4-108
4.1.2 Pallet 运算 ....................................................................................................................... 4-109
4.1.3 程控 ................................................................................................................................. 4-113
(1) 无条件分支 · 条件分支 · 待机 ........................................................................................ 4-113
(2) 循环 .............................................................................................................................. 4-115
(3) 插入 .............................................................................................................................. 4-116
(4) 子程序 ........................................................................................................................... 4-117
(5) 定时器 ........................................................................................................................... 4-118
(6) 停止 .............................................................................................................................. 4-119
4.1.4 外部信号的输出入 ........................................................................................................... 4-120
(1) 信号输入 ....................................................................................................................... 4-120
(2) 信号输出 ....................................................................................................................... 4-120
4.1.5 通信 ................................................................................................................................. 4-121
4.1.6 运算 ................................................................................................................................. 4-122
(1) 运算符一览 ................................................................................................................... 4-122
(2) 位置数据的相对运算 (乘算) ....................................................................................... 4-123
(3) 位置数据的相对运算 (加算) ....................................................................................... 4-123
4.1.7 附随句 ............................................................................................................................. 4-124
4.2 MELFA-BASIC V 和 MELFA-BASIC IV 的差异 ..................................................................... 4-125
4.2.1 关于 MELFA-BASIC V .................................................................................................... 4-125
4.2.2 MELFA-BASIC V 的特点 ................................................................................................. 4-125
4.2.3 和 MELFA-BASIC IV 的比较 ........................................................................................... 4-125
4.3 多重任务处理功能 (Multitask) ............................................................................................ 4-126
4.3.1 所谓多重任务处理功能 .................................................................................................... 4-126
4.3.2 多重任务的执行方法 ....................................................................................................... 4-127
4.3.3 各多重插槽运行状态 ....................................................................................................... 4-127
4.3.4 多任务程序制作上的注意点 ............................................................................................. 4-129
(1) 任务数目和处理时间的关系 .......................................................................................... 4-129
(2) 指定并列执行程序行数的最大值 ................................................................................... 4-129
(3) 在全局变量的程序间的数据的交接方法 ........................................................................ 4-129
(4) 用机器人 (系统)状态变量的程序运行状态的确认 .................................................... 4-129
(5) 机器人动作的程序基本上在任务插槽 1 执行 ................................................................. 4-129
(6) 在平时执行程序的初始化处理 ....................................................................................... 4-129
4.3.5 多任务插槽程序运行上的注意点 .................................................................................... 4-130
(1) 多任务的开始 ................................................................................................................ 4-130
(2) 运行状态的表示 ............................................................................................................ 4-130
4.3.6 多任务的使用例 ............................................................................................................... 4-131
(1) 机器人的作业内容 ......................................................................................................... 4-131
(2) 到多任务为止的步骤 ..................................................................................................... 4-132
4.3.7 关于程序容量 .................................................................................................................. 4-133
(1) 程序储存领域 .............................................................................................................. 4-133
(2) 程序编辑领域 .............................................................................................................. 4-133
iii目录
页
(3) 程序执行领域 .............................................................................................................. 4-133
4.4 MELFA-BASIC V 的详细规格 ................................................................................................ 4-134
(1) 程序名制作 ................................................................................................................... 4-134
(2) 指令 .............................................................................................................................. 4-134
(3) 变量 .............................................................................................................................. 4-134
4.4.1 文 .................................................................................................................................... 4-135
4.4.2 附随文 ............................................................................................................................. 4-135
4.4.3 行 .................................................................................................................................... 4-135
4.4.4 行号码 ............................................................................................................................. 4-135
4.4.5 标签 ................................................................................................................................. 4-135
4.4.6 可以在程序内使用的文字种类 ......................................................................................... 4-136
4.4.7 有特别意义的文字 ........................................................................................................... 4-137
(1) 大写、小写的区别 ......................................................................................................... 4-137
(2) 下划线 (_) ..................................................................................................................... 4-137
(3) 撇号 (’ ) ...................................................................................................................... 4-137
(4) 星号 (*) ......................................................................................................................... 4-137
(5) 逗号 (,) .......................................................................................................................... 4-137
(6) 句号 (.) .......................................................................................................................... 4-137
(7) 空白 .............................................................................................................................. 4-137
4.4.8 数据类型 ......................................................................................................................... 4-138
4.4.9 常数 ................................................................................................................................. 4-138
4.4.10 数值常数 ....................................................................................................................... 4-138
(1) 10 进制 ......................................................................................................................... 4-138
(2) 16 进制 ......................................................................................................................... 4-138
(3) 2 进制 ........................................................................................................................... 4-138
(4) 常数类型 ....................................................................................................................... 4-138
4.4.11 字符串常数 .................................................................................................................... 4-138
4.4.12 位置常数 ....................................................................................................................... 4-139
(1) 坐标 · 姿势 · 附加轴资料的形式和意义 ......................................................................... 4-139
(2) 构造标志数据的形式和意义 .......................................................................................... 4-139
4.4.13 关节常数 ....................................................................................................................... 4-140
(1) 各轴数据的形式和意义 ................................................................................................. 4-140
4.4.14 角度值 ........................................................................................................................... 4-141
4.4.15 变量 ............................................................................................................................... 4-141
4.4.16 数值变量 ....................................................................................................................... 4-142
4.4.17 字符串变量 .................................................................................................................... 4-142
4.4.18 位置变量 ....................................................................................................................... 4-142
4.4.19 关节变量 ....................................................................................................................... 4-143
4.4.20 输出入变量 .................................................................................................................... 4-143
4.4.21 数组变量 ....................................................................................................................... 4-143
4.4.22 全局变量 ....................................................................................................................... 4-144
4.4.23 程序全局变量 ................................................................................................................ 4-144
4.4.24 使用者定义全局变量 ..................................................................................................... 4-145
4.4.25 使用者基本程序的制作 .................................................................................................. 4-145
4.5 机器人的坐标系说明 .............................................................................................................. 4-146
4.5.1 关于机器人的坐标系 ....................................................................................................... 4-146
4.5.2 关于基本变换 .................................................................................................................. 4-147
4.5.3 关于位置数据 .................................................................................................................. 4-148
4.5.4 关于 TOOL 坐标系 (机械 I/F 坐标系) ........................................................................... 4-149
(1) 机械 I/F 坐标系 ............................................................................................................. 4-149
(2) TOOL 坐标系 ................................................................................................................ 4-150
(3) TOOL 坐标系的使用效果 .............................................................................................. 4-151
4.6 机器人 (系统)状态变量 ..................................................................................................... 4-153
4.6.1 逻辑数 ............................................................................................................................. 4-156
4.7 函数 ....................................................................................................................................... 4-156
(1) 使用者定义函数 ............................................................................................................ 4-156
(2) 内建函数 ....................................................................................................................... 4-156
iv目录
页
4.8 指令一览 ................................................................................................................................ 4-158
(1) 动作控制关连的指令 ..................................................................................................... 4-158
(2) 程序控制相关的指令 .................................................................................................... 4-159
(3) 定义指令 ....................................................................................................................... 4-160
(4) 多任务相关 ................................................................................................................... 4-160
(5) 其它 .............................................................................................................................. 4-160
4.9 运算符号 ................................................................................................................................ 4-161
4.10 运算的优先级 ...................................................................................................................... 4-162
4.11 程序的控制构造深度 ............................................................................................................ 4-162
4.12 保留字 ................................................................................................................................. 4-162
4.13 指令的详细说明 ................................................................................................................... 4-163
4.13.1 记载项目的见解 ............................................................................................................. 4-163
4.13.2 各指令的说明 ................................................................................................................ 4-163
4.14 机器人 (系统)状态变量的详细说明 ................................................................................. 4-287
4.14.1 记载项目的说明 ............................................................................................................. 4-287
4.14.2 各机器人状态变量 (系统状态变量)的说明 ................................................................. 4-287
4.15 函数的详细说明 ................................................................................................................... 4-366
4.15.1 记载项目的说明 ............................................................................................................. 4-366
4.15.2 各函数的说明 ................................................................................................................ 4-366
5 参数的设定功能 ........................................................................................................................... 5-407
5.1 动作参数 ................................................................................................................................ 5-407
5.2 信号参数 ................................................................................................................................ 5-418
5.2.1 关于多 CPU 输入偏置 (仅限 CR7xx-Q 控制器) ............................................................ 5-422
(1) 案例 (A) ..................................................................................................................... 5-422
(2) 案例 (B) ..................................................................................................................... 5-423
5.3 操作参数 ................................................................................................................................ 5-425
5.4 程序参数 ................................................................................................................................ 5-427
5.5 通信参数 ................................................................................................................................ 5-430
5.6 关于标准 TOOL 坐标 ............................................................................................................. 5-432
5.7 关于标准基本坐标 ................................................................................................................. 5-434
5.8 关于使用者定义领域 .............................................................................................................. 5-435
5.8.1 坐标系的选择 .................................................................................................................. 5-436
5.8.2 领域的定义 ...................................................................................................................... 5-437
5.8.3 对象机器的选择 ............................................................................................................... 5-439
5.8.4 指定使用者定义领域内的举动 ......................................................................................... 5-439
5.8.5 设定示例 ......................................................................................................................... 5-439
5.9 自由平面限制 ........................................................................................................................ 5-440
5.9.1 自由平面极限的定义 ....................................................................................................... 5-440
5.9.2 自由平面极限的坐标系选择 ............................................................................................. 5-441
5.10 中断时的 JOG 前进后的自动回归设定 ................................................................................ 5-442
5.11 电源开启的程序自动执行方法 ............................................................................................. 5-443
5.12 关于抓手种类 ...................................................................................................................... 5-444
(1) 电磁阀的种类和信号号码 .............................................................................................. 5-444
5.13 关于抓手初始状态 ............................................................................................................... 5-445
(1) CR750/CR751 控制器 .................................................................................................. 5-445
(2) CR760 控制器 .............................................................................................................. 5-446
5.14 关于输出信号复位模式 ........................................................................................................ 5-447
5.15 关于通信设定 (以太网) .................................................................................................... 5-449
5.15.1 各参数的详细内容 ......................................................................................................... 5-449
(1) NETIP (控制器的 IP 地址) ......................................................................................... 5-449
(2) NETMSK (子网掩码) ................................................................................................. 5-449
(3) NETPORT (端口号码) ............................................................................................... 5-449
(4) CPRCE11 ~ 19 (协议) ............................................................................................. 5-450
v目录
页
(5) COMDEV( 对应 COM1 :~ 8 的设备定义 ) ................................................................. 5-450
(6) NETMODE (服务器指定) .......................................................................................... 5-450
(7) NETHSTIP (数据通信对象的服务器的 IP 地址) ........................................................ 5-450
(8) MXTTOUT (执行 realtime 外部控制指令时的超时设定) ............................................ 5-450
5.15.2 参数设定示例 1 (使用支持软件时) ............................................................................. 5-451
5.15.3 参数设定示例 2-1 (使用数据链路功能:控制器为服务器时) ...................................... 5-452
5.15.4 参数设定示例 2-2 (使用数据链路功能:控制器为客户机时) ...................................... 5-453
5.15.5 参数设定示例 3 (使用实时外部控制功能) .................................................................. 5-454
5.15.6 连接的确认 .................................................................................................................... 5-455
5.15.7 通过 Windows 的 ping 指令确认连接的方法 .................................................................. 5-455
5.16 关于抓手、工件条件设定 (最佳加减速设定) .................................................................... 5-456
5.17 关于特异点接近警告 ............................................................................................................ 5-458
5.18 关于高速 RAM 运行功能 ..................................................................................................... 5-459
5.19 关于暖机运行模式 ............................................................................................................... 5-461
5.20 关于特异点通过功能 ............................................................................................................ 5-467
5.21 关于冲突检知功能 ............................................................................................................... 5-472
(1) 功能的概要 ................................................................................................................... 5-472
(2) 关连参数 ....................................................................................................................... 5-473
(3) 使用冲突检知功能时 ..................................................................................................... 5-474
5.22 关于过负载 Level 的最佳化 ................................................................................................. 5-479
5.23 Pallet 定义指令的多旋转限制 .............................................................................................. 5-480
5.24 关于干涉回避功能 ............................................................................................................... 5-481
5.24.1 操作步骤 ....................................................................................................................... 5-482
5.24.2 机器的准备和连接 ......................................................................................................... 5-483
5.24.3 干涉确认用模型的登录 .................................................................................................. 5-484
5.24.4 自由平面极限的登录 ..................................................................................................... 5-492
5.24.5 附加轴的对应 ................................................................................................................ 5-493
5.24.6 共享存储器扩展功能的设定 (仅限机器人之间的干涉确认时) ..................................... 5-494
5.24.7 机器人之间的校准 (仅限机器人之间的干涉确认时) ................................................... 5-496
5.24.8 干涉回避功能的有效 / 无效设定 .................................................................................... 5-498
5.24.9 干涉回避功能的使用 ..................................................................................................... 5-499
5.24.10 采样程序 ..................................................................................................................... 5-500
5.25 PLC 输入输出单元直接控制 ................................................................................................ 5-502
(1) 规格 .............................................................................................................................. 5-502
(2) 操作步骤的概要 ............................................................................................................ 5-502
(3) 参数的说明 ................................................................................................................... 5-503
(4) PLC 的 “多 CPU 设定” .............................................................................................. 5-504
(5) 机器人状态变量的说明 ................................................................................................. 5-504
5.26 在机器人 CPU 之间直接通信 ............................................................................................... 5-506
(1) 规格 .............................................................................................................................. 5-506
(2) 利用方法 ....................................................................................................................... 5-506
(3) 机器人状态变量的说明 ................................................................................................. 5-506
5.27 关于冗余系统错误的动作选择参数 ...................................................................................... 5-507
6 外部输出入的功能 ....................................................................................................................... 6-508
6.1 种类 ....................................................................................................................................... 6-508
6.2 PLC 连接输出入功能 ............................................................................................................. 6-509
6.2.1 参数设定 ......................................................................................................................... 6-509
(1) PLC CPU 的参数设定 ................................................................................................... 6-509
(2) 机器人 CPU 的参数设定 ............................................................................................... 6-510
6.2.2 CPU 共有内存和机器人输入输出信号的对应 ................................................................. 6-512
6.2.3 PLC 梯形图的范例 .......................................................................................................... 6-512
6.2.4 专用输入输出信号的分配 (工厂出货时设定) ................................................................ 6-514
6.3 专用输出入 ............................................................................................................................ 6-516
6.4 信号的有效无效状态 .............................................................................................................. 6-526
vi目录
页
6.5 外部信号的时序图 ................................................................................................................. 6-527
6.5.1 各信号的个别时序图 ....................................................................................................... 6-527
6.5.2 时序图例 ......................................................................................................................... 6-536
(1) 外部信号操作时序图 (其 1) ....................................................................................... 6-536
(2) 外部信号操作时序图 (其 2 ) ...................................................................................... 6-537
(3) 外部信号操作时序图 (其 3) ....................................................................................... 6-538
(4) 外部信号操作时序图 (其 4 ) ...................................................................................... 6-539
(5) 外部信号操作时序图 (其 5) ....................................................................................... 6-540
6.6 通过外部信号选择 · 执行程序的方法 ..................................................................................... 6-541
6.6.1 种类 ................................................................................................................................. 6-541
6.6.2 执行方法的选择 ............................................................................................................... 6-541
6.6.3 相关的输入输出参数 ....................................................................................................... 6-541
6.6.4 操作步骤 ......................................................................................................................... 6-542
6.7 紧急停止输入 ........................................................................................................................ 6-544
6.7.1 紧急停止输入时的机器人的动作 ..................................................................................... 6-544
7 附录 ....................................................................................................................................... 附录 -545
7.1 关于构造标志 .................................................................................................................. 附录 -545
7.2 多功能电动抓手的使用方法 ............................................................................................. 附录 -547
7.2.1 概要 ........................................................................................................................... 附录 -547
(1) 设备构成 (例) ...................................................................................................... 附录 -547
7.2.2 规格 ........................................................................................................................... 附录 -548
7.2.3 限制事项 ................................................................................................................... 附录 -548
(1) 可使用的设备和软件版本 ........................................................................................ 附录 -548
(2) 站号设定 ................................................................................................................. 附录 -548
(3) 多功能电动抓手的驱动电源 (与机器人本体的关系) ............................................. 附录 -549
7.2.4 操作注意事项 ............................................................................................................ 附录 -549
(1) 原点回归 ................................................................................................................. 附录 -549
(2) 关于在 ALWAYS (始终执行)程序中的执行 ......................................................... 附录 -551
7.2.5 操作步骤 ................................................................................................................... 附录 -552
7.2.6 参数的设定 ................................................................................................................ 附录 -552
(1) 执行器类型的设定 ................................................................................................... 附录 -552
(2) 控制参数的设定 ...................................................................................................... 附录 -553
7.2.7 多功能电动抓手的操作 .............................................................................................. 附录 -554
(1) 抓手号码的切换 ...................................................................................................... 附录 -555
(2) 原点回归 ................................................................................................................. 附录 -555
(3) 抓手开闭操作 .......................................................................................................... 附录 -556
(4) 动作位置示教 .......................................................................................................... 附录 -556
(5) 向示教位置移动 ...................................................................................................... 附录 -558
(6) 把持动作 ................................................................................................................. 附录 -559
(7) 动作速度的设定 ...................................................................................................... 附录 -560
(8) 力 (把持力)的设定 .............................................................................................. 附录 -560
7.2.8 机器人语言的规格 ..................................................................................................... 附录 -561
(1) 指令一览 ................................................................................................................. 附录 -561
(2) 状态变量一览 .......................................................................................................... 附录 -561
(3) 指令的详细说明 ...................................................................................................... 附录 -562
(4) 状态变量的详细说明 ............................................................................................... 附录 -572
7.2.9 参数一览 ................................................................................................................... 附录 -576
7.2.10 报警一览 ................................................................................................................. 附录 -578
7.3 多重抓手的使用方法 ........................................................................................................ 附录 -580
7.3.1 概要 ........................................................................................................................... 附录 -580
(1) 设备构成 (例) ...................................................................................................... 附录 -580
(2) 可使用的机器和软件版本 ........................................................................................ 附录 -580
7.3.2 操作步骤 ................................................................................................................... 附录 -581
(1) 参数的设定 ............................................................................................................. 附录 -581
(2) 抓手开闭操作 (R32TB) ....................................................................................... 附录 -584
(3) 工具号码 (TOOL 坐标参数)与多重抓手的关系 ................................................... 附录 -585
vii目录
页
(4) 关于报警 ................................................................................................................. 附录 -586
7.4 关于样条插补 .................................................................................................................. 附录 -587
7.4.1 概要 ........................................................................................................................... 附录 -587
(1) 概要 ........................................................................................................................ 附录 -587
(2) 特征 ........................................................................................................................ 附录 -587
(3) 必要的设备与软件版本 ........................................................................................... 附录 -588
(4) 术语 ........................................................................................................................ 附录 -588
7.4.2 规格 ........................................................................................................................... 附录 -589
(1) 基本规格 ................................................................................................................. 附录 -589
(2) 限制事项 ................................................................................................................. 附录 -590
(3) 样条插补中的机器人的动作 .................................................................................... 附录 -590
(4) 路径点相关的检查 ................................................................................................... 附录 -592
7.4.3 功能的说明 ................................................................................................................ 附录 -593
(1) 路径补偿 ................................................................................................................. 附录 -593
(2) 动作模式 ................................................................................................................. 附录 -596
(3) 信号输出 ................................................................................................................. 附录 -597
(4) 数值设定 ................................................................................................................. 附录 -598
(5) 帧转换 ..................................................................................................................... 附录 -598
7.4.4 作业步骤 ................................................................................................................... 附录 -600
7.4.5 样条文件的创建 ......................................................................................................... 附录 -602
(1) 新建 ........................................................................................................................ 附录 -602
(2) 通过 DXF 文件导入功能创建 .................................................................................. 附录 -603
(3) 用机器人语言新建 ................................................................................................... 附录 -609
(4) 打开现有的样条文件 ............................................................................................... 附录 -609
(5) 样条文件编辑画面的说明 ........................................................................................ 附录 -611
(6) 样条文件编辑时的菜单栏 ........................................................................................ 附录 -613
(7) 路径点数据的内容 ................................................................................................... 附录 -615
(8) 样条文件的编辑 ...................................................................................................... 附录 -616
(9) 样条文件的保存 ...................................................................................................... 附录 -622
(10) 样条文件的删除 .................................................................................................... 附录 -624
(11) 样条号的更改 ........................................................................................................ 附录 -624
(12) 样条文件的复制 .................................................................................................... 附录 -625
(13) 样条文件管理 ........................................................................................................ 附录 -626
(14) 导入 · 导出功能 ..................................................................................................... 附录 -627
(15) 编辑的辅助功能 .................................................................................................... 附录 -636
(16) 样条曲线的显示 .................................................................................................... 附录 -638
(17) 编辑内容的确认 .................................................................................................... 附录 -638
(18) 机器人程序 ........................................................................................................... 附录 -639
7.4.6 机器人程序的创建 ..................................................................................................... 附录 -642
7.4.7 动作的确认 ................................................................................................................ 附录 -645
7.4.8 保存至机器人控制器 ................................................................................................. 附录 -645
7.4.9 调整作业 ................................................................................................................... 附录 -645
(1) 位置补偿功能 .......................................................................................................... 附录 -645
(2) 帧转换功能 ............................................................................................................. 附录 -647
(3) 跳位 ........................................................................................................................ 附录 -650
(4) 参数 SPLOPTGC .................................................................................................... 附录 -651
7.5 关于 Ex-T 控制 ................................................................................................................ 附录 -652
7.5.1 概要 ........................................................................................................................... 附录 -652
(1) 特征 ........................................................................................................................ 附录 -652
(2) 规格 ........................................................................................................................ 附录 -653
(3) 必要的设备与软件版本 ........................................................................................... 附录 -653
7.5.2 Ex-T 坐标的设定 ....................................................................................................... 附录 -653
(1) 设定方法 ................................................................................................................. 附录 -653
7.5.3 Ex-T JOG .................................................................................................................. 附录 -654
(1) 工件 JOG 中的姿势成分动作 .................................................................................. 附录 -655
(2) Ex-T JOG 中的姿势成分动作 .................................................................................. 附录 -655
(3) Ex-T JOG 的操作 .................................................................................................... 附录 -656
(4) RV6 轴型的工件 JOG 动作 ..................................................................................... 附录 -657
viii目录
页
(5) RH4 轴型的工件 JOG 动作 ..................................................................................... 附录 -659
(6) RH4 轴垂吊型的工件 JOG 动作 .............................................................................. 附录 -661
7.5.4 机器人程序的创建 ..................................................................................................... 附录 -663
(1) Ex-T 控制相关指令 · 变量的一览 ............................................................................ 附录 -663
(2) 编程示例 ................................................................................................................. 附录 -663
好例子网口号:伸出你的我的手 — 分享!
小贴士
感谢您为本站写下的评论,您的评论对其它用户来说具有重要的参考价值,所以请认真填写。
- 类似“顶”、“沙发”之类没有营养的文字,对勤劳贡献的楼主来说是令人沮丧的反馈信息。
- 相信您也不想看到一排文字/表情墙,所以请不要反馈意义不大的重复字符,也请尽量不要纯表情的回复。
- 提问之前请再仔细看一遍楼主的说明,或许是您遗漏了。
- 请勿到处挖坑绊人、招贴广告。既占空间让人厌烦,又没人会搭理,于人于己都无利。
关于好例子网
本站旨在为广大IT学习爱好者提供一个非营利性互相学习交流分享平台。本站所有资源都可以被免费获取学习研究。本站资源来自网友分享,对搜索内容的合法性不具有预见性、识别性、控制性,仅供学习研究,请务必在下载后24小时内给予删除,不得用于其他任何用途,否则后果自负。基于互联网的特殊性,平台无法对用户传输的作品、信息、内容的权属或合法性、安全性、合规性、真实性、科学性、完整权、有效性等进行实质审查;无论平台是否已进行审查,用户均应自行承担因其传输的作品、信息、内容而可能或已经产生的侵权或权属纠纷等法律责任。本站所有资源不代表本站的观点或立场,基于网友分享,根据中国法律《信息网络传播权保护条例》第二十二与二十三条之规定,若资源存在侵权或相关问题请联系本站客服人员,点此联系我们。关于更多版权及免责申明参见 版权及免责申明

网友评论
我要评论