
实例介绍
【实例简介】
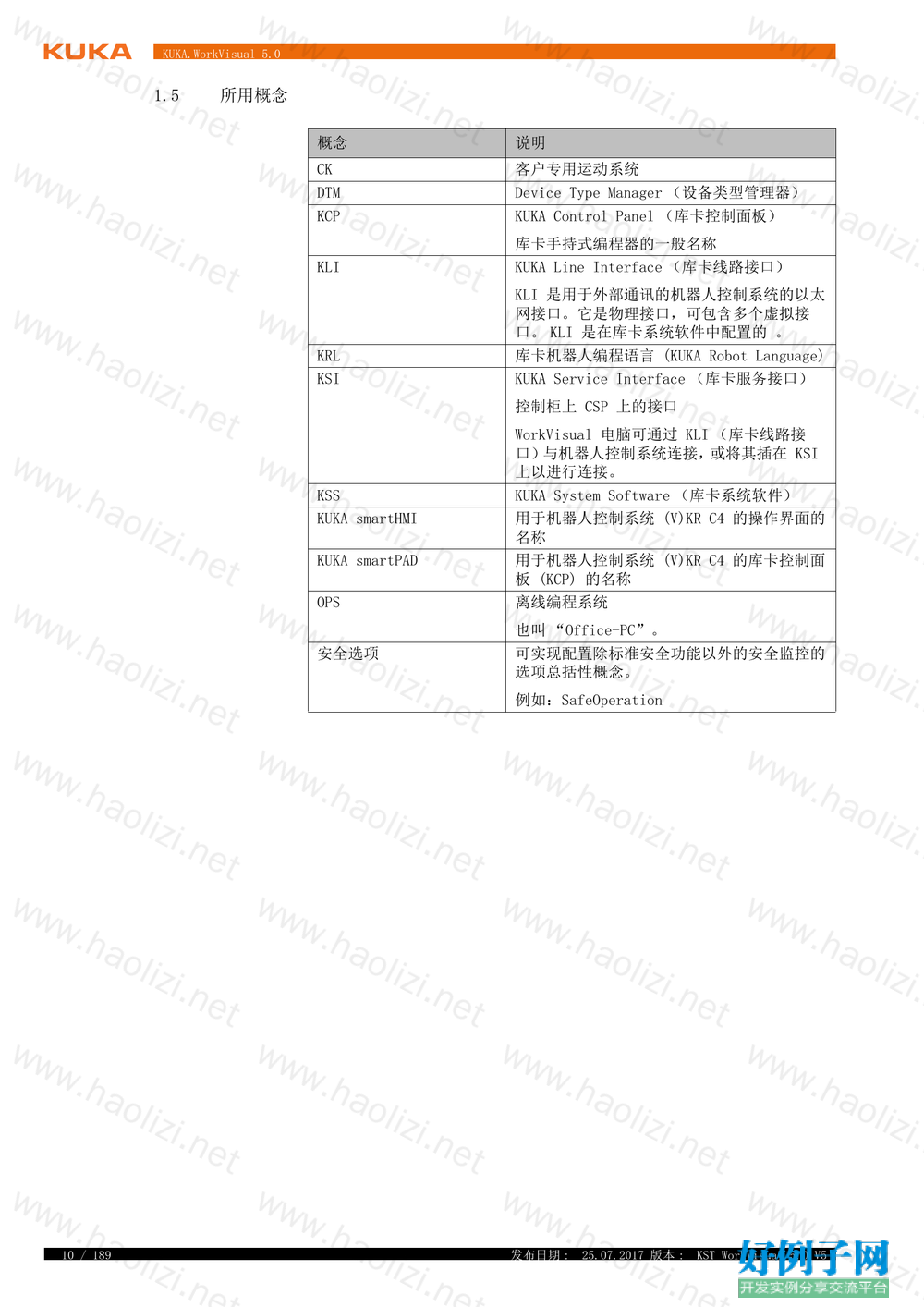
库卡编程软件操作说明,库卡KST_WorkVisual_50_zh.pdf

【核心代码】
KUKA.WorkVisual 5.0 1 引言 1.1 目标群体 1.2 提示的图示 1.3 商标 1.4 许可证 1.5 所用概念 2 产品说明 2.1 WorkVisual 概览 2.2 按规定使用 WorkVisual 3 安全 4 安装 4.1 PC 系统要求 4.2 机器人控制系统的系统要求 4.3 安装 WorkVisual 4.4 卸载 WorkVisual 4.5 生成并启动便携版 5 操作界面 5.1 操作界面概览 5.2 显示/隐藏窗口 5.3 改变窗口排列方式 5.4 显示操作界面的各种视图 5.5 显示或隐藏按键 5.6 按钮栏 5.7 窗口信息提示 5.8 窗口项目结构 5.9 窗口 单元配置 5.9.1 改变对象排列方式 5.10 复位操作界面 6 操作 6.1 启动 WorkVisual 6.2 打开项目 6.3 创建新项目 6.3.1 建立一个新的空项目 6.3.2 借助于模板创建项目 6.3.3 在现有项目基础上创建项目 6.4 在项目中保存信息 6.5 保存项目 6.6 关闭项目 6.7 结束 WorkVisual 6.8 导入设备说明文件 6.9 编目 6.9.1 更新 DtmCatalog(编目扫描) 6.9.2 将编目添加到项目中 6.9.3 添加编目 6.9.4 将编目从项目中删除 6.9.5 编目说明(8.2) 6.9.6 编目说明(8.3 以上) 6.10 将元素添加至项目 6.11 从项目中删除元素 6.12 添加机器人控制系统 6.13 将机器人控制系统设置为激活/未激活 6.14 更改数值固件版本和/或输入/输出端数量 6.15 将机器人配给机器人控制系统 6.16 激活附加的控制系统设置 6.16.1 设置 传输应用的节拍时间 6.16.2 激活制动器测试 6.16.3 更改工具和基坐标系的数量 6.17 配置制动器测试 6.18 添加安全选项和/或 PROCONOS 6.19 添加硬件组件 6.20 添加附加轴 6.21 编辑附加轴的机器数据 (8.2) 6.22 编辑机器数据(8.3 以上) 6.23 比较运动系统(和应用区别) 6.24 更新机器数据 6.25 将运动系统导出至编目 6.26 编辑工具和基坐标系 6.26.1 打开工具/基坐标管理 6.26.2 配置工具/基坐标管理 6.26.3 工具和基坐标系 6.26.4 对象 6.26.5 更新工具和基坐标系 6.26.6 导入工具和基坐标系 6.26.7 转换工具和基坐标系 6.26.8 将对象导出至编目 6.26.9 从编目导入对象 6.26.10 复制和粘贴测量数据 6.26.11 显示工具和基坐标系的应用 6.27 比较文件 6.28 在项目中应用文件中的数据 6.28.1 用 WorkVisual 在项目中应用 DAT 文件中的数据 6.29 在线定义单元 6.29.1 打开单元定义 6.29.2 配置单元定义 6.29.3 编辑单元 6.30 备选软件包 6.30.1 在 WorkVisual 中安装备选软件包 6.30.2 升级备选软件包 6.30.3 卸载备选软件包 6.30.4 将备选软件包添加到项目中 6.30.5 将备选软件包从项目中删除 6.30.6 给机器人控制系统添加备选软件包中的一个设备 6.30.7 从备选软件包导出文件 6.31 检测项目 6.31.1 创建检测计划 6.31.2 配置预定义检测功能 6.31.3 执行检测计划 6.31.4 同时检测多个项目 6.32 导出部分项目 6.33 导入部分项目 6.34 改变 WorkVisual 预定义的属性 6.35 打印功能 7 投入运行 7.1 与机器人控制系统建立连接 8 安全配置 8.1 WorkVisual 中的安全配置 8.2 编辑局部安全配置 8.3 局部安全配置参数 8.3.1 选项卡一般设置 (8.2) 8.3.2 一般设置选项卡(8.3 以上) 8.3.3 选项卡轴监控 (8.3) 8.4 导入安全配置(SCG 导入) 8.5 导出安全配置(SCG 导出) 8.6 导入安全配置(XML 导入) 8.7 导出安全配置(XML 导出) 8.8 比较安全配置 8.9 复位安全配置 9 现场总线配置 9.1 现场总线概览 9.2 建立现场总线 9.2.1 建立现场总线概览 9.2.2 将现场总线主机粘贴到项目中 9.2.3 配置现场总线主机 9.2.4 将设备手动添加到总线 9.2.5 配置设备 9.2.6 将设备自动添加到总线(总线扫描) 9.3 由现场总线设备编辑信号 9.3.1 信号编辑器 9.3.2 更改信号位宽 9.3.3 转储信号(字节顺序反向) 9.3.4 更改数据类型 9.3.5 更改信号名称 9.4 连接总线 9.4.1 窗口输入输出接线 9.4.2 窗口输入输出接线中的按键 9.4.3 连接输入端与输出端 9.4.4 将总线输入端与总线输出端通过输入输出接线相连 (8.2) 9.4.5 将总线输入端与总线输出端通过传输应用相连 (8.3) 9.4.6 将信号通过输入输出接线进行多重连接或反向连接 9.4.7 查找所属信号 9.4.8 给信号编组 9.4.9 编辑模拟 KRC 信号 9.5 导出总线配置 10 长文本 10.1 显示/编辑长文本 10.2 导入长文本 10.3 导出长文本 11 库卡总线配置: 控制器总线、系统总线、扩展总线 11.1 概览 11.2 配置库卡总线 (8.2) 11.2.1 将设备添加到 KUKA 总线中 (8.2) 11.2.2 检查设备设置 11.2.3 将设备并入库卡总线 11.2.4 选项卡拓扑结构 11.2.5 添加 Waggon 驱动程序配置 11.3 配置库卡总线 (8.3) 11.4 分配 FSoE 从属设备地址(≥ 8.2.21 和 8.3) 11.4.1 FSoE 地址 11.4.2 确定 Lenze 公司 KSP/KPP 的序列号 11.4.3 确定 RDC 的系列号 11.5 分配 FSoE 从属设备地址(≤ 8.2.20) 12 RoboTeam 12.1 建立 RoboTeam 12.1.1 建立新的 RoboTeam 项目 12.1.2 将 RoboTeam 插入现有项目中 12.2 配置 RoboTeam 12.2.1 确定时间主机 12.2.2 确定动作主机 12.2.3 删除主从连接 12.2.4 创建和配置工作范围 13 编程 13.1 建立程序 13.2 导入程序 13.3 在文件中查找和替换 13.4 KRL 编辑器 13.5 用 KRC 浏览器在线工作 13.6 调试程序 14 项目传输和激活 14.1 生成代码 14.2 钉住项目 14.3 将机器人控制系统配给实际应用的机器人控制系统 14.4 将项目传输给机器人控制系统 14.5 激活项目 14.5.1 (从 WorkVisual)激活项目 14.6 检查机器人控制系统的安全配置 14.7 从机器人控制系统载入项目 14.8 比较项目(和应用区别) 14.9 应用另一个项目中的数据 14.10 更新项目 15 诊断 15.1 项目分析 15.1.1 自动分析项目是否出现错误 15.1.2 配置项目分析 15.2 测量记录 15.2.1 配置并启动测量记录 15.2.2 导入测量记录配置 15.2.3 导出测量记录配置 15.2.4 更改跟踪配置的预设 15.2.5 Trace 配置窗口 15.2.6 导入测量记录 15.2.7 显示测量记录 15.2.8 窗口测量记录分析 15.2.9 转移、放大、缩小示波器显示 15.2.10 制作示波器显示的屏幕抓图 15.3 记录网络流量 15.4 显示机器人控制系统的信息和系统日志 15.4.1 选项卡 MessageLogs 15.4.2 选项卡 SystemLogs(系统日志) 15.5 显示机器人控制系统的诊断数据 15.5.1 传输应用模式的诊断数据 15.6 显示在线系统信息 16 KUKA Service 索引
好例子网口号:伸出你的我的手 — 分享!
小贴士
感谢您为本站写下的评论,您的评论对其它用户来说具有重要的参考价值,所以请认真填写。
- 类似“顶”、“沙发”之类没有营养的文字,对勤劳贡献的楼主来说是令人沮丧的反馈信息。
- 相信您也不想看到一排文字/表情墙,所以请不要反馈意义不大的重复字符,也请尽量不要纯表情的回复。
- 提问之前请再仔细看一遍楼主的说明,或许是您遗漏了。
- 请勿到处挖坑绊人、招贴广告。既占空间让人厌烦,又没人会搭理,于人于己都无利。
关于好例子网
本站旨在为广大IT学习爱好者提供一个非营利性互相学习交流分享平台。本站所有资源都可以被免费获取学习研究。本站资源来自网友分享,对搜索内容的合法性不具有预见性、识别性、控制性,仅供学习研究,请务必在下载后24小时内给予删除,不得用于其他任何用途,否则后果自负。基于互联网的特殊性,平台无法对用户传输的作品、信息、内容的权属或合法性、安全性、合规性、真实性、科学性、完整权、有效性等进行实质审查;无论平台是否已进行审查,用户均应自行承担因其传输的作品、信息、内容而可能或已经产生的侵权或权属纠纷等法律责任。本站所有资源不代表本站的观点或立场,基于网友分享,根据中国法律《信息网络传播权保护条例》第二十二与二十三条之规定,若资源存在侵权或相关问题请联系本站客服人员,点此联系我们。关于更多版权及免责申明参见 版权及免责申明

网友评论
我要评论