
实例介绍
【实例简介】
【实例截图】


【核心代码】
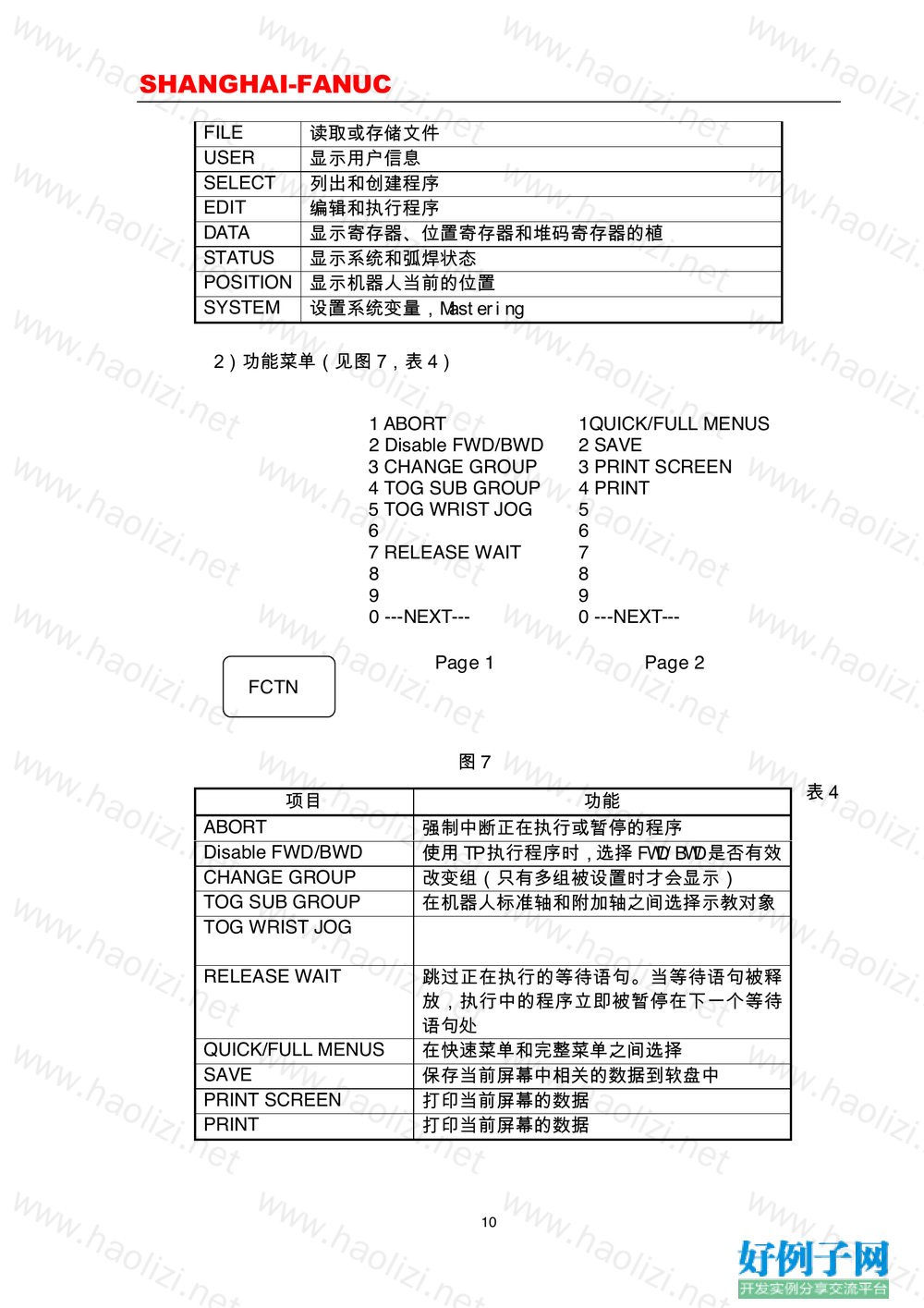
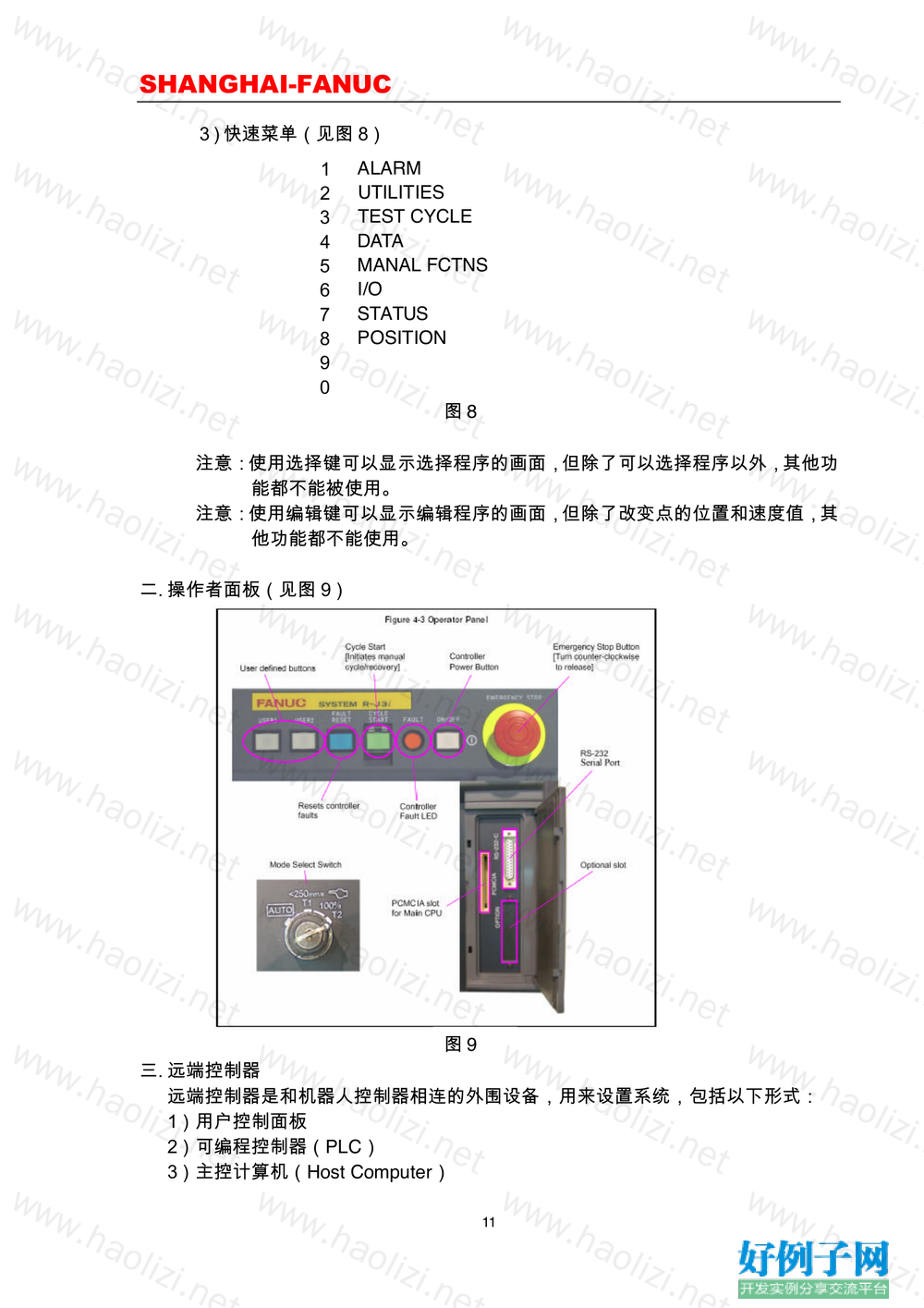
目 录 认识 FANUC 机器人 4 1.概论----------------------------------------------------------------------------------------------------------- 4 1)机器人的构成------------------------------------------------------------------------------------------- 4 2)机器人的用途------------------------------------------------------------------------------------------- 4 3)FANUC 机器人的型号-------------------------------------------------------------------------------- 4 4)机器人主要参数---------------------------------------------------------------------------------------- 5 5)FANUC 机器人的安装环境--------------------------------------------------------------------------- 5 6)FANUC 机器人的编程方式--------------------------------------------------------------------------- 5 7)FANUC 机器人的特色功能--------------------------------------------------------------------------- 5 2.FANUC 机器人的构成--------------------------------------------------------------------------------- 5 1)FANUC机器人软件系统------------------------------------------------------------------------------- 5 2)FANUC机器人硬件系统------------------------------------------------------------------------------- 5 3.控制器------------------------------------------------------------------------------------------------------- 5 1)认识 TP--------------------------------------------------------------------------------------------------- 5 (1)TP 的作用--------------------------------------------------------------------------------------------- 5 (2)认识TP上的键---------------------------------------------------------------------------------------- 7 (3)TP上的开关------------------------------------------------------------------------------------------- 8 (4)TP 上的指示灯---------------------------------------------------------------------------------------- 8 (5)TP 上的显示屏---------------------------------------------------------------------------------------- 8 (6)屏幕菜单和功能菜单--------------------------------------------------------------------------------- 9 2)操作者面板----------------------------------------------------------------------------------------------- 11 3)远端控制器----------------------------------------------------------------------------------------------- 11 4)显示器和键盘-------------------------------------------------------------------------------------------- 12 5)通讯-------------------------------------------------------------------------------------------------------- 12 6)输入/输出 I/O-------------------------------------------------------------------------------------------- 12 7)外部 I/O---------------------------------------------------------------------------------------------------- 12 8)机器人的运动-------------------------------------------------------------------------------------------- 12 9)急停设备-------------------------------------------------------------------------------------------------- 12 10)附加轴--------------------------------------------------------------------------------------------------- 12 安全 13 1.注意事项---------------------------------------------------------------------------------------------------- 13 2.以下场合不可使用机器人---------------------------------------------------------------------------- 13 3.安全操作规程--------------------------------------------------------------------------------------------- 13 编程 14 1.有效编程的技巧----------------------------------------------------------------------------------------- 14 1)运动指令-------------------------------------------------------------------------------------------------- 14 2)设置 HOME 点------------------------------------------------------------------------------------------- 14 2.通电和关电------------------------------------------------------------------------------------------------ 15 1)通电-------------------------------------------------------------------------------------------------------- 15 2)关电-------------------------------------------------------------------------------------------------------- 15 3.手动示教机器人----------------------------------------------------------------------------------------- 15 1)示教模式-------------------------------------------------------------------------------------------------- 15 2)设置示教速度-------------------------------------------------------------------------------------------- 16 3)示教-------------------------------------------------------------------------------------------------------- 16 SHANGHAI-FANUC 2 4.创建程序---------------------------------------------------------------------------------------------------- 16 1)选择程序-------------------------------------------------------------------------------------------------- 16 2)选择程序编辑画面-------------------------------------------------------------------------------------- 16 3)创建一个新程序----------------------------------------------------------------------------------------- 17 5.示教运动状态--------------------------------------------------------------------------------------------- 17 1)运动指令-------------------------------------------------------------------------------------------------- 17 6.修正点------------------------------------------------------------------------------------------------------- 19 7.编辑命令(EDCMD)------------------------------------------------------------------------------------ 20 8.程序操作---------------------------------------------------------------------------------------------------- 22 1)查看和修改程序信息----------------------------------------------------------------------------------- 22 2)删除程序文件-------------------------------------------------------------------------------------------- 23 3)复制程序文件-------------------------------------------------------------------------------------------- 23 执行程序 24 1.程序中断和恢复----------------------------------------------------------------------------------------- 24 1)急停中断和恢复----------------------------------------------------------------------------------------- 24 2)暂停中断和恢复----------------------------------------------------------------------------------------- 24 3)报警引起的中断----------------------------------------------------------------------------------------- 24 2.手动执行程序--------------------------------------------------------------------------------------------- 25 3.手动 I/O 控制---------------------------------------------------------------------------------------------- 26 1)强制输出-------------------------------------------------------------------------------------------------- 26 2)仿真输入/输出------------------------------------------------------------------------------------------- 26 4. Wait 语句-------------------------------------------------------------------------------------------------- 27 5.自动运行---------------------------------------------------------------------------------------------------- 27 程序结构 28 1.运动指令---------------------------------------------------------------------------------------------------- 28 2.焊接指令---------------------------------------------------------------------------------------------------- 28 1)焊接开始指令-------------------------------------------------------------------------------------------- 28 2)焊接结束指令-------------------------------------------------------------------------------------------- 28 3)摆焊开始指令-------------------------------------------------------------------------------------------- 29 4)摆焊结束指令-------------------------------------------------------------------------------------------- 29 3.寄存器指令------------------------------------------------------------------------------------------------ 29 1)寄存器指令----------------------------------------------------------------------------------------------- 29 2)位置寄存器指令----------------------------------------------------------------------------------------- 29 4.I/O指令------------------------------------------------------------------------------------------------------ 30 1)数字 I/O 指令 30 5.分支指令---------------------------------------------------------------------------------------------------- 30 1)Label 指令------------------------------------------------------------------------------------------------ 30 2)未定义条件的分支指令-------------------------------------------------------------------------------- 30 3)定义条件的分支指令----------------------------------------------------------------------------------- 30 4)条件选择分支指令-------------------------------------------------------------------------------------- 31 6.等待指令---------------------------------------------------------------------------------------------------- 31 1)时间的等待指令----------------------------------------------------------------------------------------- 31 2)条件等待指令-------------------------------------------------------------------------------------------- 31 7.偏置条件指令--------------------------------------------------------------------------------------------- 32 8.程序控制指令--------------------------------------------------------------------------------------------- 32 SHANGHAI-FANUC 3 9.其他指令---------------------------------------------------------------------------------------------------- 32 1)用户报警指令-------------------------------------------------------------------------------------------- 32 2)时钟指令-------------------------------------------------------------------------------------------------- 32 3)运行速度指令-------------------------------------------------------------------------------------------- 32 4)注释指令-------------------------------------------------------------------------------------------------- 32 5)消息指令-------------------------------------------------------------------------------------------------- 32 FRAMES 的设置 33 1.坐标系的分类--------------------------------------------------------------------------------------------- 33 2.设置工具坐标系----------------------------------------------------------------------------------------- 33 3.设置用户坐标系----------------------------------------------------------------------------------------- 34 4.设置点动坐标系----------------------------------------------------------------------------------------- 34 宏 MACRO 35 1.概述----------------------------------------------------------------------------------------------------------- 35 2.设置宏指令------------------------------------------------------------------------------------------------ 35 3.执行宏指令------------------------------------------------------------------------------------------------ 37 1)在 TP 的 MANUAL FCTN 画面中执行-------------------------------------------------------------- 37 2)使用 TP 的用户键执行--------------------------------------------------------------------------------- 37 文件的输入/输出 38 1.文件的输入/输出设备---------------------------------------------------------------------------------- 38 1)选择文件输入/输出设备----------------------------------------------------------------------------- 38 2)文件---------------------------------------------------------------------------------------------------------- 39 2.备份文件和加载文件---------------------------------------------------------------------------------- 40 1)备份文件--------------------------------------------------------------------------------------------------- 40 2)加载文件--------------------------------------------------------------------------------------------------- 41 Mastering 42 1.为什么要 Mastering(原点复归)------------------------------------------------------------------- 42 2. Mastering的方式--------------------------------------------------------------------------------------- 42 3. 0 度位置 Mastering------------------------------------------------------------------------------------ 42 4.单轴 Mastering------------------------------------------------------------------------------------------- 43 基本保养 45 1. 概述--------------------------------------------------------------------------------------------------------- 45 2. 更换电池-------------------------------------------------------------------------------------------------- 45 1) 更换控制器主板上的电池--------------------------------------------------------------------------- 45 2) 更换机器人本体上的电池--------------------------------------------------------------------------- 45 3. 更换润滑油----------------------------------------------------------------------------------------------- 46 1) 换减速器和齿轮盒润滑油--------------------------------------------------------------------------- 46 2) 更换平衡块轴承润滑油------------------------------------------------------------------------------ 46 4. 控制器一般故障维修--------------------------------------------------------------------------------- 48 5. 控制器 SRVO(伺服)类报警代码分析及解决办法------------------------------------- 59
好例子网口号:伸出你的我的手 — 分享!
小贴士
感谢您为本站写下的评论,您的评论对其它用户来说具有重要的参考价值,所以请认真填写。
- 类似“顶”、“沙发”之类没有营养的文字,对勤劳贡献的楼主来说是令人沮丧的反馈信息。
- 相信您也不想看到一排文字/表情墙,所以请不要反馈意义不大的重复字符,也请尽量不要纯表情的回复。
- 提问之前请再仔细看一遍楼主的说明,或许是您遗漏了。
- 请勿到处挖坑绊人、招贴广告。既占空间让人厌烦,又没人会搭理,于人于己都无利。
关于好例子网
本站旨在为广大IT学习爱好者提供一个非营利性互相学习交流分享平台。本站所有资源都可以被免费获取学习研究。本站资源来自网友分享,对搜索内容的合法性不具有预见性、识别性、控制性,仅供学习研究,请务必在下载后24小时内给予删除,不得用于其他任何用途,否则后果自负。基于互联网的特殊性,平台无法对用户传输的作品、信息、内容的权属或合法性、安全性、合规性、真实性、科学性、完整权、有效性等进行实质审查;无论平台是否已进行审查,用户均应自行承担因其传输的作品、信息、内容而可能或已经产生的侵权或权属纠纷等法律责任。本站所有资源不代表本站的观点或立场,基于网友分享,根据中国法律《信息网络传播权保护条例》第二十二与二十三条之规定,若资源存在侵权或相关问题请联系本站客服人员,点此联系我们。关于更多版权及免责申明参见 版权及免责申明

网友评论
我要评论